Власов В.Н.
Механизм плавания рыб и дельфинов, а также полета птиц как вариант движения с отталкиванием от среды.
Однажды я запустил поисковик от Яндекса на своем компьютере, чтобы он выдал мне перечень страниц, где могла бы содержаться информация о маятнике Капицы. Одна из ссылок вывела меня на интересную статью с интригующим названием Способ движения и устройство типа «Рыба». Автор - Юрий Евгеньевич Устюгин. И когда я её прочитал, то мне стало ясно, что это материал будет интересен каждому стороннику эфиродинамики и альтернативной энергетики.
Ученые и любители спорят о возможном механизме перемещения в эфире как мировой среде. Но пока особо похвастаться нечем. Многие из исследователей сходятся на том, что эфир – это материальная среда, по свойствам напоминающая очень плотную жидкость, плотность которой превышает плотность воды в тысячи раз. При этом эта среда обладает крайне малой вязкостью, которая сказывается на движении вещественных тел, да и потоков самого эфира, только при очень высоких скоростях и ускорениях.
Разница между просто эфиром и веществом заключается в том, что вещество – это эфир, в котором часть его закручена в виде торовидных вихрей, заполненных паром эфира. И чем больше вихрей в веществе или чем они мощнее, тем «тяжелее» вещество в общепризнанном понимании, но плотность его по отношению к эфиру меньше, и тем сильнее оно взаимодействует с эфирными потоками, особенно при ускорениях, например, теми, которые принимаются нами за гравитацию.
И пока официальная наука доказывает, что эфира нет, и что нам никогда не долететь до ближайшей звезды, обитатели воздушного и водного Океанов на нашей Земле смогли успешно освоиться в воздушной и водной среде, используя механизмы полета и плавания, у которых есть много общих черт, если особо не придираться к мелочам. И в этом механизме мы постараемся разобраться именно с позиций эфиродинамики. Но пока сделаем небольшое отступление.
Начнем с рыб. Русская Википедия определяет рыб следующим образом:
«Рыбы (лат. Pisces) — надкласс водных животных, обширная группа челюстноротых позвоночных, для которых характерно жаберное дыхание на всех этапах постэмбрионального развития организма. Рыбы распространены как в солёных, так и в пресных водах, от глубоких океанических впадин до горных ручьев. Рыбы играют большое значение для всех водных экосистем как составляющая пищевых цепей и большое экономическое значение для человека из-за употребления их в пищу. Размеры современных рыб варьируют от 7,9 мм (Paedocypris progenetica) до 13,7 м (китовая акула). В мире известно, по разным данным, от 25 000 до 31 000 видов рыб. В России обитает около 3000 видов, в том числе в пресных водах встречается более 280 видов. Изучению рыб посвящён раздел зоологии — ихтиология».
Рыбы имеют самую разную форму, но, как правило, их можно условно разделить на туловище, хвост и плавники (рис.1.).
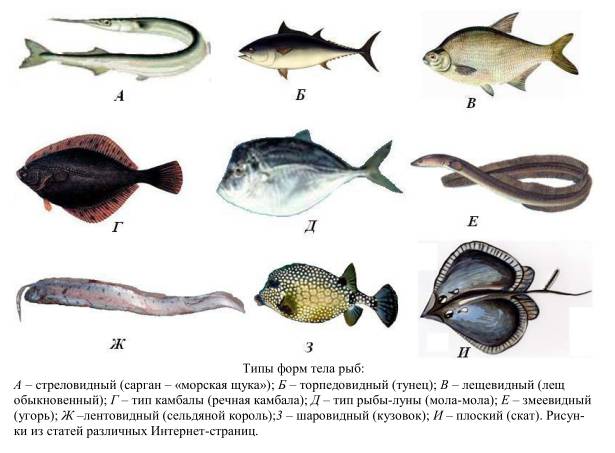
Рис.1 Типы форм тела рыб.
У каждой части тела рыбы свое назначение и роль, что позволяет рыбам легко перемещаться в воде практически в любом направлении. Кожные покровы рыбы покрыты самой разнообразной чешуёй, защищающей рыбу от более сильных сородичей, а высокоразвитая нервная система имеет кроме головного и спинного мозга развитые органы чувств и большое количество кожных рецепторов самого разного назначения. Основная часть рецепторов сосредоточена в боковой линии, но имеется много рецепторов и на других участках тела, способных реагировать на электромагнитные сигналы, на давление и температуру окружающей воды. У рыб развитое зрение, слух, хорошее обоняние и вкусовые рецепторы. Многие виды рыб имеют специальный пузырь, позволяющий в некоторых пределах изменять плотность тела, что позволяет без особых затрат энергии перемещаться по вертикали – опускаться и подниматься. Но такой хищник как акула пузыря не имеет, поэтому она вынуждена плавать, чтобы не утонуть.

Рис.2. Рыбы бывают разными.
Как плавают рыбы? Когда рыба перемещается в своей родной среде – воде, то её тело совершает сложные колебания, благодаря которым рыба может развить очень большие скорости, недоступные современным надводным и подводным кораблям. Рыбы используют, по крайней мере, два способа плавания – волнообразно извиваясь всем телом или двигая в основном только хвостом. Рыбы, имеющие змееобразную форму (например, угорь), плавают первым способом, так что изгиб тела движется от головы к хвосту, «отталкивая» назад воду, в результате чего рыба движется вперёд. При втором способе воду «отталкивает» назад только быстро распрямляющийся хвост рыбы. Но даже в самом простом случае туловище и хвост изгибаются в противофазе, образуя синусоподобную кривую (Рис.3).
Рис.3. Два способа плавания рыб – с помощью волнообразного движения всего туловища (вверху) и в основном только хвоста (внизу).
Для второго способа ученые провели измерения, чтобы иметь представление амплитуде колебаний (отклонений) точек тела и хвоста от срединной линии, как в правую сторону от срединной линии (направления движения), так и в левую. Ясно, что отклонения в обе стороны равны по модулю, поэтому на рис.4 приведен как раз модуль отклонения, хотя надо помнить, что хвост и голова в каждый момент времени отклоняются в разные стороны. Максимальное отклонение хвоста от направления движения составляет около 10% от длины тела рыбы (туловище+хвост). И такого отклонения оказывается достаточно, чтобы например, тунец мог развить скорость в 50 км/час, а рыба-мечь – 150 км/ч.
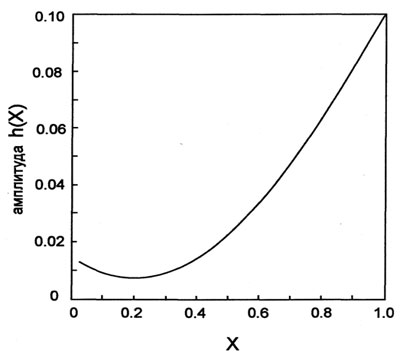
Рис.4. Распредение амплитуды отклонений точек тела от головы (0.0) до хвоста (1.0) рыбы от прямой, вдоль которой движется рыба.
Рыба перемещается в воде за счет противофазного смещения туловища и хвоста. Это отражено на рис.5.
Рис.5. Схема противофазного отклонения туловища и хвоста рыбы во время перемещения в воде.
На рис.6 эта закономерность показана в виде трех фаз, на которые можно условно разбить весь цикл движений туловища и хвоста рыбы при перемещении в водной среде. Прошу обратить внимание на характерный изгиб тела рыбы.

Рис.6. Последовательность движений рыбы при перемещении в воде.
*-*
Теперь приступим к анализу механизма плавания дельфина, а на его примере и остальных китообразных (рис.7).
Рис.7. Дельфины в дельфинарии.
Википедия определяет дельфинов так:
Дельфи́ны, или дельфи́новые (лат. Delphinidae) — семейство млекопитающих отряда китообразных, подотряда зубатых китов (Odontoceti). Дельфины характеризуются присутствием в обеих челюстях довольно значительного числа однородных конических зубов, оба носовых отверстия соединены обыкновенно в одно поперечное отверстие полулунной формы на вершине черепа, голова относительно небольшая, часто с заостренной мордой, тело вытянутое, есть спинной плавник. Очень подвижные и ловкие, прожорливые хищники, живущие в основном общественно, водятся во всех морях, поднимаются даже высоко в реки, питаются главным образом рыбой, моллюсками, ракообразными; иногда нападают и на своих сородичей. Отличаются также любознательностью и традиционно хорошим отношением к человеку.
У одних дельфинов рот вытянут вперед в виде клюва; y других голова спереди округленная, без клювовидного рта. Дельфины плавают исключительно быстро, стайки дельфинов часто следуют за кораблями, используя, помимо нижеописанного «парадокса Грея», кильватерную волну кораблей для ещё большего ускорения. Дельфин был любим и популярен с древности: существует множество поэтических сказаний и поверий (предание об Арионе) о дельфинах и их скульптурных изображений.
Слово дельфин восходит к греческому δελφίς (delphis), которое в свою очередь произошло от индоевропейского корня *gʷelbh- «матка», «лоно», «утроба». Название животного может быть истолковано как «новорожденный младенец» (возможно, из-за внешнего сходства с младенцем или из-за того, что крик дельфина похож на крик ребенка).
Теперь рассмотрим более подробно механизм плавания дельфина и других китообразных, у которых плоскость хвоста у дельфина расположена не вертикально, как у рыб, а горизонтально (рис.7). Поэтому тело дельфина совершает колебания не в горизонтально плоскости, а в вертикальной. Но закономерности, обнаруженные у рыб, выявлены и у дельфинов (рис.8).
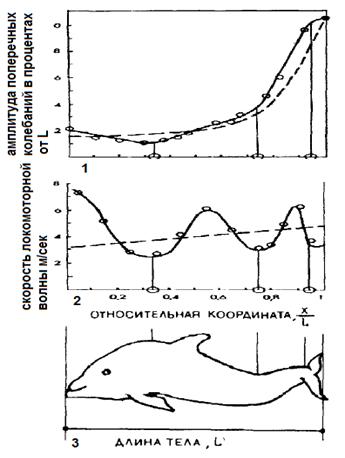
Рис.8. Кинематические характеристики плывущего дельфина.
Часть 1 рис.8 практически полностью идентичен рис.4., что указывает на то, что рыбы и дельфины используют одну и ту же технику, чтобы плавать в воде. Только у рыб тело извивается в горизонтальной плоскости, а у дельфина – в вертикальной. У рыб, кроме акул, правда, подъемная сила регулируется пузырём, а у акул и дельфинов тело выпукло сверху и сглажено снизу, что превращает тело акулы или дельфина в аналог крыла самолёта. Часть 2 рис.8 заслуживает особого внимания, так как поможет нам сделать важный вывод о происхождении тяги у рыб и дельфинов. Но об этом чуть ниже. А теперь посмотрим, как изгибается тело дельфина во время плавания (рис.9). И сравните его с рис.6.
Рис.9. Разбиение движений дельфина при плавании на фазы.
Различие кинематики у рыбы и дельфина связаны с тем, что для рыбы принята простейшая схема деления тела на 3 части (голову, туловище и хвост), а тело дельфина условно разделено на 4 части. Но сходство очевидно. И скорее всего кинематика длинной рыбы (угря или мурены) будет еще сложней при сохранении общих закономерностей.
*-*
Теперь можно посмотреть, как летают птицы. Википедия определяет птиц следующим образом:
Пти́цы (лат. Aves) — класс теплокровных яйцекладущих позвоночных животных, представители которого характеризуются тем, что тело их покрыто перьями и передние конечности видоизменены в органы полёта — крылья (виды, которые не летают, имеют недоразвитые крылья) Изначально строение тела птиц приспособлено к полёту, хотя в настоящее время существует много видов нелетающих птиц. Ещё одним отличительным признаком птиц является также наличие клюва. На сегодняшний день на Земле обитает более 9792 различных видов (на территории России — 600 видов (В. М. Лоскот, 1992). Это делает их наиболее разнообразной группой надкласса четвероногих. Птицы населяют все экосистемы Земного шара от Арктики до Антарктики. Наука, изучающая птиц, называется орнитология.

Рис.10. Многообразие птиц. И это еще не всё. (взято с Википедии)
Птицам приходится летать в воздухе, среде, плотность которой примерно в 800 раз меньше плотности воды. Поэтому техника их полета более сложна, чем при плавании рыб и дельфинов, ибо птицам приходится не только перемещать свое тело вперед, но и бороться с заметной силой тяжести. При планировании техника полета у птиц практически ничем не отличается от техники полета человека на планере. Правда есть существенное отличие – у птиц крылья и перья гибкие, а у планера – жесткие, хотя в последнее время имеются данные о полетах на планерах с гибкими крыльями, похожих на крылья птиц.
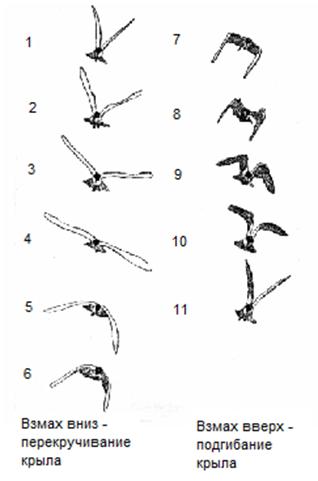
Рис.11. Траектория движения крыльев чайки (вид спереди).
Птицам необходимо не только парить (рис.12), но и иногда лететь против воздушного потока, а наличие заметной силы тяжести заставляет птиц выворачивать крылья так, чтобы каждый элемент крыла совершал движения, похожие на те, что вытворяет каждый дельфин. Хотя амплитуда колебаний точек крыльев относительно туловища птицы перпендикулярно направлению полета уже не 10%, а заметно больше.
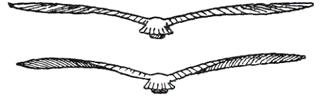
Рис. 12. Вид сзади на чайку, поднимающую крылья (верх рисунка), и на чайку, опускающую крылья (низ рисунка).
Теперь изобразим траекторию движения крыла чайки (корневой и концевой частей), с учетом выброса конца крыла вперед (рис.13).
Рис.13. Траектория движения крыла чайки при наблюдении сбоку.
До сих пор не потеряла своей актуальности книга Отто Лилиенталя «Полет птиц как основа искусства летать». Даже в наше время поражает с какой любовью и качеством Отто Лилиенталь прорисовывал тела и крылья птиц (рис.14).
Рис.14. Пример рисунка из книги Отто Лилиенталя.
Отто Лилиенталь обнаружил, что некоторые специальным образом изогнутые поверхности показывали прекрасные результаты в качестве аналогов крыла птицы (рис.15). Видно, что некоторые поверхности копируют изгибы рыб во время плавания.

Рис.15. Поверхности, исследованные Отто Лилиенталем.
Описание всех особенностей полета птиц, тем более разных птиц, в короткой статье невозможно, тем более задача этой статьи состоит не в этом, а в выявлении неких закономерностей, позволяющих птицам, рыбам, дельфинам и, возможно насекомым, летать и плавать, затрачивая при этом совсем мало энергии. У птиц самым важными органами, позволяющие им летать – это крылья (рис.16).

Рис.16. Крыло птицы – необходимый орган для полета.
В крыле важнейшим элементом является перо, самые важные из них – это маховые перья, отсутствие или повреждение которых лишает птицу способности летать. В поперечном сечении маховое перо выглядит примерно так (рис.17_3):

Рис.17. Варианты маховых перьев и пример поперечного сечения махового пера.
Обращает на себя то, что поперечное сечение махового пера, подобно поперечному сечению крыла, а оба этих сечения похожи на изогнутую во время плавания рыбу. Есть также сходство и с дельфином в одну из фаз его движения под водой. Крыло можно рассматривать в качестве целого набора «дельфинов», которые двигаясь слажено по программе, задаваемой мозгом птицы, а также самой структурой крыла и маховых перьев, обеспечивают птице подъемную силу и пульсирующую силу, перемещающую птицу в направлении её полета.
Таким образом, сравнение строения тела рыб, дельфинов и птиц показало, что структура их движителей примерно одинакова. А значит, они работают на одних и тех же физических принципах. И мы эти принципы, возможно, прекрасно знаем, только не умеем грамотно связать известные нам сведения. Хотя у одних животных в качестве основных движителей выступает тело (у рыбы или дельфина), а в другом специальные органы – крылья у птиц и, возможно, у насекомых. И если тела рыб или дельфинов практически симметричны, то крылья и маховые перья птиц имеют более жесткую форму, которая связана, прежде всего, с тем, что птицам приходится летать в атмосфере, подвергаясь не только давлению воздуха, но и действию силы тяжести. Тогда как рыбы и дельфины плавают в воде, давление которой согласно закону Паскаля равномерно направлено во все стороны, а сила тяжести компенсируется полностью или в значительной степени силой Архимеда.
/*/
Теперь настал момент объяснить, зачем меня так привлек механизм плавания рыб и дельфинов с одной стороны и механизм полета птиц с другой стороны. Дело в том, что учёные до сих пор не могут ответить на вопрос, как многие рыбы и дельфины умудряются двигаться в воде со скоростями, недоступными иногда даже для птиц в воздухе. Меч-рыба, например, плывет со скоростью до 130-150 км/ч; тунец – 90 км/ч. Дельфин может развивать скорость до 40-60 км/час.
Восхищение стремительным движением дельфинов было одним из первых впечатлений, полученных человеком при наблюдении за этими животными. Однако у учёных, занимавшихся изучением дельфинов, восхищение в конце 30-х годов XX века сменилось… недоумением. Дело в том, что английский зоолог профессор Джеймс Грей, изучавший движение водных животных, произведя необходимые расчёты, заявил, что дельфины не должны развивать той скорости, которую они на самом деле развивают.
Если изготовить муляж меч-рыбы и подсчитать коэффициент лобового сопротивления CD, то окажется, что рыбе необходимо развить мощность автомобильного мотора – около 100 л.с. Энергия живых существ – это энергия окислительных процессов. Но рыбы – существа холоднокровные, их температура ненамного выше температуры воды, в которой кислород, кстати, растворён в очень небольшом количестве. Поэтому такие мощности для них просто недостижимы! Остаётся предположить, что рыбы каким-то образом «умеют» очень сильно снижать сопротивление воды или влиять на окружающую среду каким-то иным способом.
При быстром движении обычного (неживого) предмета через воду вихри образуются только позади тела. Согласно закону Бернулли, давление в них падает, что оказывает на тело тормозящее действие. Одна из гипотез, объясняющих резкое снижение сопротивления воды движению меч-рыбы, состоит в том, что меч, находящийся впереди, служит генератором вихрей, которые переходят на тело рыбы. В результате рыба движется, будучи со всех сторон окружена вихрями – областями низкого давления, что соответствует чрезвычайно низкому сопротивлению движению. Такого же эффекта можно достичь, если поверхность тела сделать шероховатой, возмущая пограничный слой между телом и жидкостью и превращая её течение в вихревое (турбулентное) по всей поверхности контакта. Какой из этих механизмов уменьшения СD реализуется у меч-рыбы учёные до сих пор не знают.
С учётом плотности воды, которая в 800 раз больше плотности воздуха, размеров и массы дельфинов, самая большая скорость, которую согласно гидродинамическим расчётам могут развивать дельфины, не может превышать 20 км/ч. По расчётам Грея получалось, что для достижения скорости в 40-50 км/ч, какую дельфины имеют фактически, сила их мышц должна превышать обычную чуть ли не в 10 раз (сопротивление пропорционально кубу скорости)!
На самом деле отношение силы к единице массы мышцы у китообразных, в том числе у дельфинов, приблизительно такое же, как и у всех млекопитающих и не может изменяться в больших пределах. Кроме того, если бы мышцы обладали необычной силой, то дыхательная и сердечнососудистая система дельфинов не смогла бы обеспечить работающие мышцы кислородом. Однако мышцам дельфинов, работающим на «предельной мощности», вполне хватает кислорода. Такое несоответствие теоретических и фактических возможностей китообразных назвали парадоксом Грея.
В учебниках официальные ученые важно пишут о том, что птицы летают исключительно за счѐт создания подъѐмной силы механическим маханием крыльями. Но, посмотрите на косяки перелѐтных птиц и сделайте нехитрый подсчѐт, на сколько порядков (!) не совпадѐт расчѐт энергозатрат на перемещение тела птицы (того же гуся, журавля) на расстояния в тысячи километров с реальной мускулатурой и запасами питательных веществ этих самых птиц. Сказочка не проходит. «Парадокс Грея» не устраним.
В учебниках официальные ученые важно пишут, будто рыбы плавают исключительно за счѐт механического виляния хвостиком. Но, скажите на милость, это с какой сверхзвуковой (!) частотой надо вилять своим плавником дельфину, чтобы перемещать в воде свою тушу в 200–400 кг со скорость в 60 км/час, или меч-рыбе в одну тонну со скоростью 150 км/час или вкусной черноморской рыбе луфарь, в полпуда весом, развивая крейсерскую скорость 250 км/час на дистанции в сотни километров? Некоторые небольшие рыбы с легкостью преодолевают тысячи километров (угри). Явная нестыковка теории с реальными данными.
В дельфинариях часто показывают эффектный трюк – «стойка дельфина на хвосте», когда дельфин делает стойку, полностью высовываясь из воды, кроме хвоста, – на несколько секунд. Дрессировщики говорят, что для дельфинов этот трюк сложный; и они устают от нервно-мышечного напряжения при его выполнении. Но, тем не менее, это факт, что туша в 200 кг замирает над водой на несколько секунд, – а хвост не превращается на это время в совковую лопату, а вода – в лѐд. Опять сказочка не проходит! «Парадокс Грея» никуда не спрятать!
Поразительно, но факт - современная фундаментальная наука «физика» не способна объяснить не только многочисленные явления в живой природе. Она не способна объяснить сам феномен существования этой «живой природы». Надо же понять, наконец, что всё так называемое «стройное здание фундаментальной науки» с еѐ «законами», «постулатами» и «началами» – буквально запрещает существовать «живой природе», живым организмам. Естественно – включая и самого человека. По законам физики – не должно быть всего этого! Не должно! Не должно, а мы, люди, существуем, да еще бегаем, войны и революции затеваем.
Трава, оказывается, растёт в нарушение фундаментальных законов физики, разнообразие видов животных и устойчивость их сложнейшей организации – вне всяких физических «начал» и «постулатов», «теорий» и «механик». И не по этой ли причине обманутое и зомбированное человечество безропотно приняло сегодня инквизиторский приговор современной мировой академической науки, будто Земля не способна обеспечить достойного уровня существования более одного миллиарда людей? А ведь это ложь.
И ложь откровенная! Солнечной энергии достаточно для обеспечения, через фотосинтез и морепродукты, устойчивого и зажиточного существования на Земле 500 миллиардам людей! Но фундаментальная физика вынесла человечеству свой приговор: «жизнь» – это не научно (!) Ей вторит фундаментальная политическая экономия: жить на Земле более чем одному миллиарду людей – это не гуманно (!)... Человечеству, на строго «научной» основе, уготовили участь Освенцима... Видимо, кто-то готовится, в том числе и через организацию экономического и финансового кризиса, освободить Землю от существующих форм жизни, в том числе и человека, и подготовить нашу планету для других форм жизни, например, для разумных рептилий.
Рассмотрим теперь особенности движения пингвинов. Вот, что мы прочитаем в любом учебнике о механизме движения пингвинов. Гребут крыльями спереди и сверху назад и вниз, словно «летают» в воде: 36 километров в час – неплохая скорость для пловца. Мощные мышцы на лопатках и грудном киле позволяют махать гребущими крыльями два-три раза в секунду». «Порой, разогнавшись, пингвины выпрыгивают, проносятся, как дельфины, над морем и ныряют вновь. На льдины из воды прыгают солдатиком, вертикально, и, одолев полутораметровую высоту, приземляются на обе лапы. Не падают, неловко поскользнувшись. Крылья превращены в покрытые чешуевидными перьями ласты, которыми пингвины гребут при плавании и нырянии; перепончатые лапы и короткий хвост служат рулѐм. Эта сказочка о механизме передвижения пингвинов (в воде и в полѐте из воды на берег) рассыпается, если без предубеждений рассмотреть по фотографиям траектории выпрыгивания пингвинов на сушу из воды.
Самое главное: этот полёт не пассивный, а явно управляемый, визуально или иным способом управляемый самим пингвином. Причём пингвин управляет своим полётом по двум параметрам: по изменению направления и величины тяги движения. Тело и голова в напряжѐнном состоянии; подвижны только лапы (как дюзы реактивного двигателя с переменным вектором тяги) и хвост (дополнительный балансир). Точность приземления – ювелирная! Полный аналог посадки геликоптера, – «свечкой»! Во второй фазе полёта (спуска на льдину) явно происходит замедление скорости полёта, для выполнения мягкой, щадящей посадки на обе лапы. Здесь пингвин усиливает форсаж своего движителя. Видно, что именно лапами пингвин регулирует вектор своей «тяги», вплоть до прочного контакта со льдиной.
Фундаментальная наука бездоказательно твердит о пассивности полѐта пингвина, условных рефлексах, врождѐнных способностях... Академики цинично утверждают, что в природе всѐ это происходит «само собой», – «по щучьему велению»... И здесь встаѐт вопрос о том, каков же реальный, а не лукавый, механизм передвижения животных. Причѐм – скрытный, то есть явно не механический, не мышечный.
Но хватит отвлекаться от темы. Нам надо попытаться понять простой механизм, управляя которым рыбы, дельфины, птицы, насекомые, а теперь вот и пингвины получают возможность быстро плавать в воде и летать в атмосфере, затрачивая при этом совсем мало энергии, тогда как при этом они совершают работу в 10 и более раз больше своих энергетических затрат, если оценивать их работу с «точки зрения» внешнего «неживого» окружения. Как живым существам удается нарушать второй закон термодинамики или закон сохранения энергии по форме, но не по содержанию? Может быть всё дело в не нарушении законов, а в их неукоснительном соблюдении.
Как живые существа достигают такого управления окружающей средой обитания, что «уговаривают» среду выполнять за них тяжёлую работу по перемещению этих живых существ на многие сотни и тысячи километров да еще с крейсерской скоростью при незначительных затратах энергии со стороны живых существ? Вот это мы попытаемся объяснить, причём буквально на пальцах., опираясь на известные всем из школьного курса физики знания.
Посмотрим внимательно на рис.3, рис.6, рис.8 и рис.16. Что напоминает эти фигуры, которые создаются телами рыбы, пингвина или махового пера птицы? Это два крыла, плавно переходящих одно в другое. При потоке водного или воздушного потока вдоль такого профиля (крыла) создается сразу две «подъемные» силы. Одна сила направлена вверх и вперед, а другая вниз и вперёд. В результате, силы, направленные вверх и вниз, практически уравновешивают друг друга, а силы направленные вперед, толкают сдвоенное крыло по направлению движения.
Естественно, в динамике всё сложнее, силы создаются изменяющимися от нуля до максимума по некому периодическому закону, но мы берем некие средние показатели, а они показывают, что два и более аэродинамических профиля, динамически меняющиеся (управляемые) с помощью сокращений, например, мышц рыб или птиц, позволяют создать вдоль профилей заметные перепады давления, которые и перемещают животных (птиц или рыб) в их среде обитания.
Гидроаэродинамические силы достаются животным даром, как даром дается человеку подъемная сила в самолете или вертолете, так как энергия топлива в основном тратится на преодоление сопротивления воздуха и перемещение самолета или вертолета от точки А до точки Б. И эти силы достигают огромных величин.
Рис.18.
На рис.18 показано направление сил F1 и F2, а также результирующей силы F3, под действием которых рыба перемещается по направлению своего движения. Естественно, когда рыба принимает «нейтральную» форму, то силы F1, F2 и F3 равны нулю. Но если рассматривать динамику сил за весь цикл, когда рыба меняет форму от варианта 1 к варианту 2 через «нейтральную» позицию, то силы F1, F2 и F3 будут плавно меняться как по направлению, так и по модулю, но направление силы F3 будет примерно направлено туда, куда будет двигаться рыба. И только при резких поворотах рыбы показанный механизм может давать сбои. И тогда рыба не короткий промежуток времени может потерять способность к быстрому перемещению и превратиться с еду более удачливого хищника.
Это не рыба плывет, отталкивая воду от себя назад. Некоторые рыбы могут так плавать, что никакого следа, кокой наблюдается у любого корабля и судна, после них не остается. Получается, что это вода за счет перепада давления на противоположных сторонах тела рыбы перемещает рыбу практически без затрат энергии со стороны рыбы. Рыба только динамически изменяет свою «геометрию», что при наличии встречного водного потока позволяет создавать на выпуклых участках тела падение за счет ускорения водного потока, а на вогнутых – повышение давления воды за счет замедления водного потока, а уже локальная разность давлений, да еще в нескольких зонах вдоль изогнутого в синусоиду тела рыбы несет рыбу в заданном рыбой направлении. И чем таких зон при прочих равных условиях будет больше, тем быстрее будет двигаться (переноситься средой) рыба. Так что плавание рыбы связано с проявлением тех же сил, которые позволяют самолетам летать. Только водные животные используют эти силы с большей эффективностью, чем человек в своих летательных аппаратах, а в своих водных и подводных аппаратах использует в редких случаях. Человек упорно использует технологии отброса масс, тогда как животные реализуют совсем иной механизм.
Как известно, в основе подъемной силы лежит эффект Магнуса от взаимодействия присоединенного к крылу вихря с набегающим воздушным (водным) потоком. Эффект Магнуса – и есть тот механизм, который помогает перемещаться с большой скоростью и с малыми затратами энергии рыбам, дельфинам, птицам и насекомым. Этот же эффект Магнуса помогает пингвинам летать под водой и пулей вылетать из воды. Пингвину надо только хорошенько потренироваться и задействовать свои инстинкты, чтобы научиться выскакивать из воды на льдину и совершать «мягкую» посадку на обе лапы. Не исключаю, что внутренняя энергетика пингвина помогает ему в этом, но основную работу выполняет сама вода, реагируя на умелое воздействие на неё со стороны пингвина. Естественно, что для создания условий для проявления эффекта Магнуса птицам, насекомым, пингвинам, китообразным или рыбам приходится «выкручиваться» по-своему, с учетом строения тел и обмена веществ этих животных.
Но на их счастье тела этих животных созданы таким образом, что они вызывают эффект Магнуса при перемещении в среде обитания практически автоматически, причем сразу же после своего рождения. К сожалению, люди на такое пока не способны, так как их тела лишены необходимых рецепторов и органов чувств. Чтобы управлять средой своего обитания, её надо чувствовать. То, что человек не чувствует и не ощущает, для человека временно не существует, пока ему не удается создать прибор, аналогичным органам чувств животным, способных анализировать нужные им параметры внешней среды.
Поэтому люди вынуждены компенсировать свои природные недостатки силой своего разума. И история показывает, что человек всегда добивается поставленной цели, даже если на это ему приходится тратить столетия и тысячелетия. Правда, решения не всегда бывают оптимальные, но это связано опять-таки с недостатками нашего организма и неспособностью самостоятельно без «посредников» взаимодействовать с окружающей средой. Поэтому для выхода в космос мы используем не летающие тарелки, а громадные ракеты. Или вместо движителей, имитирующих движение рыб, мы используем винт. Или вместо холодного ядерного синтеза мы размахнулись на термоядерную реакцию. Или вместо «пластилиновой» технологии при обработке камня мы используем бетонирование, рубим камень зубилом или режем его алмазной пилой. Наши технологии отражают способности наших органов чувств. Каким мы видим и чувствуем окружающий нас реальный мир, так мы с ним и ведем себя.
Технологии, основанные на эффекте Магнуса, можно назвать имплозивными технологиями, так как эти технологии создают с помощью малых энергетических затрат заметные перепады давления, благодаря которым происходит перемещением тел, попавших в зону перепада давления. Шаубергер вызывал перепады давления с помощью рукотворных вихрей, животные для перемещения в среде обитания пошли по другому пути, который в энергетическом отношении, похоже, лучше того, что предложил Шаубергер, и который к тому же оптимально использует возможности тканей организма животных, не разрушая их при этом.
Но внимательно посмотрим на схему двигателя Виктора Шаубергера (рис.19).
Рис.19. Двигатель Шаубергера.
Зачем
Шаубергер использует волнистые упругие поверхности. Не затем ли, чтобы
имитировать потоки воды, возникающие вдоль тела плывущей рыбы ( или
дельфина)? Смотрим на правую половину рис.19. По краю диска имеется странная
изогнутая насечка, которую можно считать аналогом рыбьего хвоста. При вращении
этот диск будет энергично «прокачивать» сквозь себя огромные потоки воздуха,
раскручиваясь «хвостовым опереньем», что приведет в заметному перепаду давления
между «верхом» и «низом» двигателя. Так что получается, что тайну рыбы и
дельфина Шаубергер прекрасно знал, но нам эти знания не передал.
Рекомендую всем познакомиться со всеми статьями и патентами, размещенными на странице по адресу http://www.turbulence.ru/. Среди этих статей мне понравилась статья о волновой турбине, которая использует обнаруженный Устюгиным Ю.Е. эффект. Далее приведена слегка измененная часть текста этой статьи, хотя нумерацию рисунка мне пришлось изменить
Цель достигается применением в качестве лопасти турбины плоского или объемного гидродинамически обтекаемого гибкого упругого тела – модели рыбы. Область жесткого захвата этого тела должна удовлетворять правилу U = 0.29, причем в состоянии покоя хорда лопасти располагается в плоскости вращения турбины, перпендикулярной оси её вращения. Сама турбина состоит из п отдельных элементов, закрепленных на валу вращения турбины, каждый из которых составлен из двух и более лопастей, симметрично расположенных относительно вала вращения турбины. Тогда сила тяги лопасти возникает под воздействием текучей среды при возвратно-поступательном движении турбины относительно среды или среды относительно турбины вдоль оси ее вращения за счет гибких деформаций лопасти. Деформации подобны деформациям крыла птицы или хвоста рыбы в процессе махового движения.
Применение этого движителя в варианте лопасти для турбины дает устройство, изначально обладающее высоким КПД и знакопостоянным моментом вращения при знакопеременном направлении падения потока текучей среды на турбину.
На рис. 20 показан элемент турбины, состоящий из двух лопастей 1, закрепленных на поперечине 2 в области, соответствующей правилу U = 0.29 для лопасти. Поперечина 2 жестко соединена с валом 3, имеющим ось вращения 4. Так выглядит элемент турбины в состоянии покоя. Движение элемента вдоль оси вращения, т.е. в положительном направлении оси Z приводит к изгибным деформациям 5 лопастей, противоположное движение приводит к изгибным деформациям 6 лопастей. В обоих случаях элемент приобретает вращательное движение в направлении 7 - против часовой стрелки. Наращивание числа элементов турбины, последовательно расположенных на одном валу вращения, приводит к пропорциональному возрастанию мощности на валу вращения. Это позволяет наращивать необходимую мощность на одном валу вращения турбины без увеличения поперечных размеров колеса турбины.

Рис.20 Диметрическая проекция вращательного элемента турбины. Лопасти 1
закреплены на поперечине 2 в области, соответствующей правилу U=0,29 для
лопасти. Поперечина 2 жестко соединена с валом 3, имеющим ось вращения 4. Так
выглядит элемент турбины в состоянии покоя. Движение элемента вдоль оси
вращения, т.е. в положительном направлении оси Z, приводит к изгибным
деформациям лопастей вида 6. В обоих случаях элемент приобретает вращательное
движение в направлении 7 – против часовой стрелки.
Синими стрелками на рис.20 условино показано, что среда должна перемещаться возвратно-поступательно (туда-сюда). В случае, если среда не перемещается, то возвратно-поступательно должна перемещаться сама турбина вдоль вала (оси), что показано красной стрелкой.
В описании этой волновой турбины Устюгина Ю.Е. важно то, что энергию можно получать как за счет возвратно-поступательного (туда-сюда) движения водной или воздушной среды, а также за счет возвратно-поступательного движения оси 3, на перемещение которой будет тратиться энергии меньше, чем вырабатываться энергии при вращении вала 3. По идее такой механизм сделать несложно. И тогда вибрация лопастей вдоль оси 3 приведет во вращение их вокруг этой же оси 3. Конструкция просто замечательная, да еще с таким высоким КПД (75%). И сделать её можно не из стали, а из обыкновенной пластмассы, из которых делают плёнку и пластиковые пакеты. И чем эластичней и упругей будет лопасть, тем лучше будет проявляться эффект.
А такими могут быть движители, которыми можно будет заменить винты (рис.21)
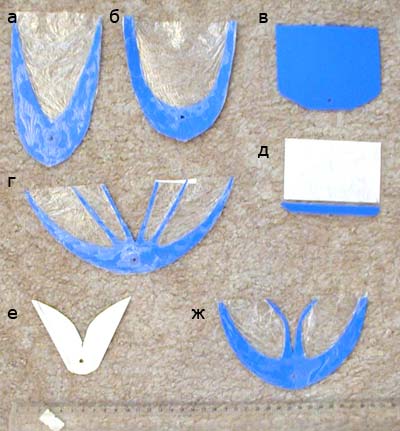
Рис.21. Движители, работающие на принципе, который используется рыбами при плавании.
Как работает такая, по сути дела, пленка, ясно из рис. 22. Сила F на рисунке показана направленной вверх, но это сила должна изменяться по закону синуса. И независимо от того, направлена эта сила вниз или вверх, движитель будет формировать силу, направленную вперед (Fтяги). И такой простой движитель имеет КПД около 75%. Хотя при научной проработке, подборе материалов, выборе правильной формы такой движитель будет полностью имитировать механику плавания рыбы. И, значит, иметь КПД больше, чем 100%. Подозреваю, что Устюгины со своими учениками это обнаружили, но не стали «дразнить гусей», обнародовав сам эффект и показали, как его можно с пользой использовать.
Рис.22. Форма прямоугольного движителя в свободном состоянии (вверху) и под действием внешней силы F (внизу). Звёздочками помечены области максимального смещения.
Такими движителями могут быть оснащены надводные и подводные транспортные средства гражданского и военного назначения. Применять их для средств типа махолета, похоже рановато, так как такой летательный аппарат нуждается в высокой надежности из необходимости бороться с силой тяжести. Хотя можно такой летательный аппарат оснастить двумя типами движителей – винтами и «хвостами рыб». А вот для дирижаблей «рыбьи хвосты» будут в самый раз. Справедливости ради следует отметить, что такие движители уже давно строят в фирме Сорокодума Е.Д., в которой разрабатываются многие направления вихре-колебательной технологии.
/*/
Надеюсь, читатель, что теперь тебе стало ясно, почему механизм плавания рыб и дельфинов, а также полета птиц должен заинтересовать любого сторонника эфиродинамики и альтернативной безтопливной энергетики. Птицы и рыбы – это, по сути дела, трансформаторы Николы Тесла, но реализованные природой «живьём». Рыбы и птицы показывают, что для перемещения в среде обитания необходимо создать особой формы стоячую волну – солитон, окружить им транспортное средство и тогда солитон перемещаясь, будет перемещать транспортное средство, помещенное внутри его. Если одного солитона недостаточно из-за диссипации энергии и его разрушения, то можно создать систему, которая будет генерировать один за другим солитоны, привязанные к средству передвижения, которые передавая эстафету друг другу, будут двигать транспортное средство столько, сколько надо оператору.
Точно также должен действовать механизм перемещения в эфире. Только для создания эфирных солитонов необходима иная технология, основы которой были заложены Николой Тесла в конце XIX и в начале XX века. Например, такие работы проводит Александр Борисович Бережной, у которого уже есть практически готовый проект летательного аппарата, способного перемещаться в воде, в атмосфере и в космосе.
На этом статью можно заканчивать. Теперь уже читатели должны решить, насколько важны для них и для человечества представленные данные. Работы в этом направлении непочатый край.
19.08.2012