Моделирование маятника Милковича в Живой Физике
Бакунин В.В.
1. Описание подготовки эксперимента.
Маятник Милковича представляет из себя в статическом положении уравновешенный рычаг (кулису), один конец которого нагружен грузом или растянутой (сжатой) пружиной, или тем и другим вместе, а другой конец – свободно весящим маятником (рис.1). При раскачивании маятника на его ось действует знакопеременная периодическая сила, что вызывает качание кулисы. При создании на кулисе полезной нагрузки в виде насоса, молота (и др.), или непосредственно на оси кулисы, т.е. знакопеременной полезной нагрузки, происходит снятие мощности.
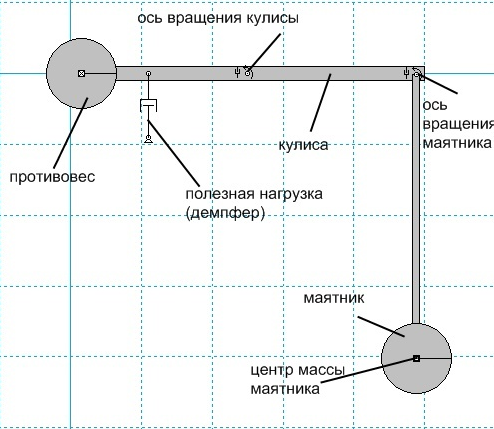
Рисунок 1. Маятник Милковича
Целью эксперимента было получение графиков полезной (выходной) мощности и затраченной (входной) мощности как функций от времени, определение мгновенной (за временной шаг измерения) работы входа и выхода, их разности, определение работы выходной и входной нагрузки за период маятника, а также предварительный анализ распределения выходной и входной работы во времени.
Поскольку автор проводил в своё время натурный эксперимент, то за параметры модели были взяты параметры, приближенные к натурному опыту: кулиса длиной 0,5 м, массой 0,2 кг (дерево), маятник 1,2 кг, штанга маятника 0,02 кг(специально занижена с целью сосредоточения центра масс маятника в его грузе), длина маятника от оси вращения до центра массы 40 см противовес 1,22 кг. Центр массы противовеса и оси маятника на одинаковом расстоянии относительно оси вращения кулисы.
Стабильная
работа маятника Милковича возможна, если подкачка маятника внешней силой
синхронизирована с собственной частотой колебания маятника (явление резонанса),
а величина нагрузки (демпфирование) достаточная, чтобы маятник не пошёл в
разнос, а совершал автоколебания. Чтобы избежать высчитывания собственной
частоты колебаний маятника или получения её экспериментальным путём было
принято простое решение – задать подкачивающую силу пропорционально скорости
центра массы маятника:
![]() (1),
(1),
где ![]() – начальная
небольшая сила, обеспечивающая страгивание маятника,
– начальная
небольшая сила, обеспечивающая страгивание маятника,
![]() – проекция
скорости центра масс маятника на ось действия подкачивающей силы,
– проекция
скорости центра масс маятника на ось действия подкачивающей силы,
К – масштабный коэффициент.
В ЖФ это было реализовано созданием горизонтальной силы, приложенной к центру масс маятника, в свойствах горизонтальной проекции которой введено следующее выражение:
![]() (1а),
(1а),
![]() - скорость
центра масс маятника
- скорость
центра масс маятника ![]() .
.
Это выражение позволяет, во-первых, задать направление силы, совпадающее с направлением скорости движения, во вторых, менять максимальное значение силы до нулевого (практически) в зависимости от изменения скорости, тем самым обеспечивая синхронное подкачивание. Масштабный коэффициент был получен экспериментально в соответствии с подбором коэффициента демпфирования полезной нагрузки таким образом, чтобы маятник совершал колебания на угол порядка 45 градусов.
Оси вращения маятника и кулисы были организованы в виде выбора такого инструмента в Живой Физике (ЖФ) как демпфер вращения с целью учёта трения на осях через возможность задания сопротивления в виде коэффициента демпфирования в инструменте демпфер вращения.
Поскольку выходная мощность – это сумма мощностей, снимаемых с полезной нагрузки (демпфера) и мощностей, идущих на преодоление трения в осях маятника и кулисы, то было принято решение не распыляться, а предположить, что вся снимаемая мощность сосредоточена в полезной нагрузке (демпфере), которая включает в себя мощности трения осей. Для этого коэффициенты демпфирования демпферов вращения осей заданы 0. Коэффициент демпфирования на демпфере был подобран экспериментально и равен 50 исходя из условия приблизительной одинаковости угла качания кулисы относительно горизонтальной оси.
В пункте меню ЖФ было выбрано измеритель угла для кулисы и маятника, измеритель мощности для демпфера. Дополнительно в измеритель мощности для демпфера была введена формула для подсчёта мгновенной мощности подкачивающей силы как произведение мгновенной силы на мгновенную скорость:
![]() (2).
(2).
В ЖФ эта формула реализована аналогично формуле для демпфера:
constraintforce(18).x * constraint[18].dv.x (2а),
где constraintforce(18).x – проекция силы подкачки (1а) на ось X,
constraint[18].dv.x – скорость этой силы на ось X.
Так как в свойствах силы подкачки [18]была поставлена галочка «Поворачивать с телом», то проекция на ось X – это и есть полная сила и скорость. Поэтому их произведение даёт мгновенную мощность подкачки.
Также был создан дополнительный измеритель для определения мгновенных работ на подкачке и демпфере, а также их разности. Мгновенная работа определяется произведением мгновенной мощности на шаг эксперимента по времени (0.025 с):
![]()
![]() (3).
(3).
В ЖФ это реализовано так:
Output[19].y1*0.025
Output[19].y2*0.025 (3а),
где Output[19].y1 – значение измерителя [19] по оси y1 (мгновенная мощность на демпфере),
Output[19].y2 – значение измерителя [19] по оси y2 (мгновенная мощность на подкачке).
Разность работ:
![]() (4).
(4).
2. Эксперимент.
После запуска эксперимента постепенно увеличивающаяся сила подкачки раскачивает маятник и доводит угол его раскачки до максимально возможного для данных параметров механизма. Основные критические положения маятника за один период представлены на рис. 2.
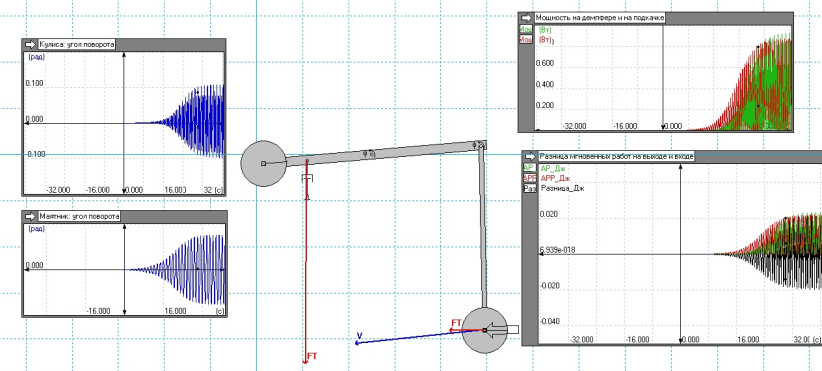
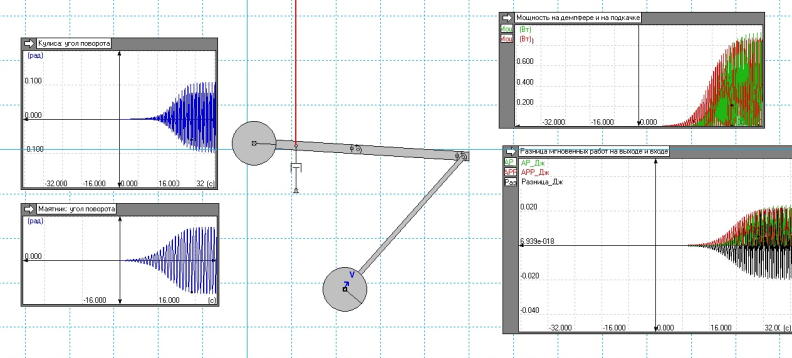
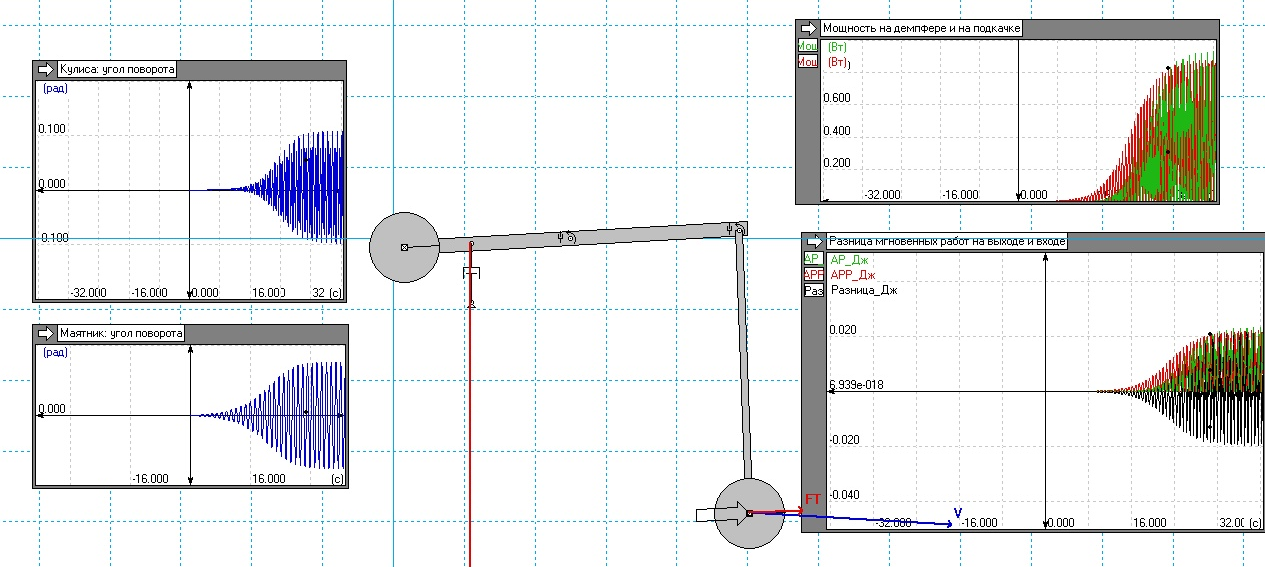
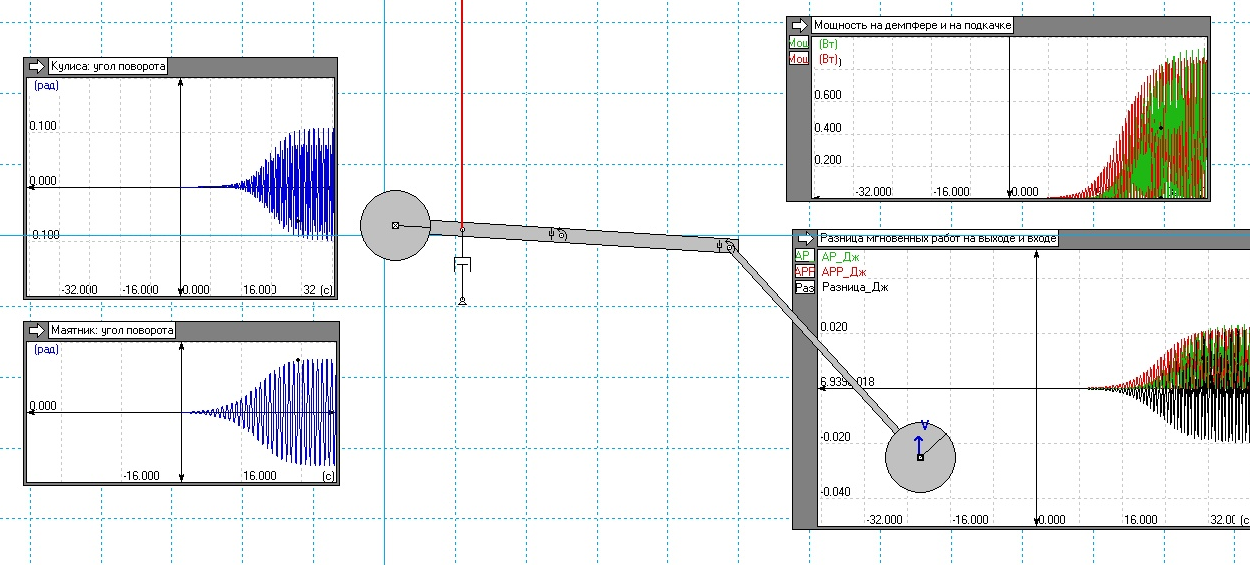
Рис. 2 Кинематика движения маятника за период
После выхода маятника на стабильный режим работы эксперимент был остановлен. Для более тщательного изучения мощностей масштаб вывода графиков был увеличен за счёт выбора временного интервала – за период качания маятника 1,28 с (от 40 до 41,28), рисунок 3. Зелёным представлен график выходной мощности устройства (демпфера), а красным – входной мощности (подкачки).
Чтобы убедиться – есть ли какой-либо выигрыш в работе на выходе устройства достаточно проинтегрировать разность работ входа и выхода за период подкачки, т.е. по большому счёту сравнить суммы зелёных и красных площадей за период работы маятника (рис.3). Визуально всё чико в чику, выигрыша нет.
Непосредственной функции интегрирования (суммирования) в ЖФ я не нашёл, поэтому перенёс результаты эксперимента в таблицу 1, а затем базу данных эксперимента в Маткад, где благополучно проинтегрировал.
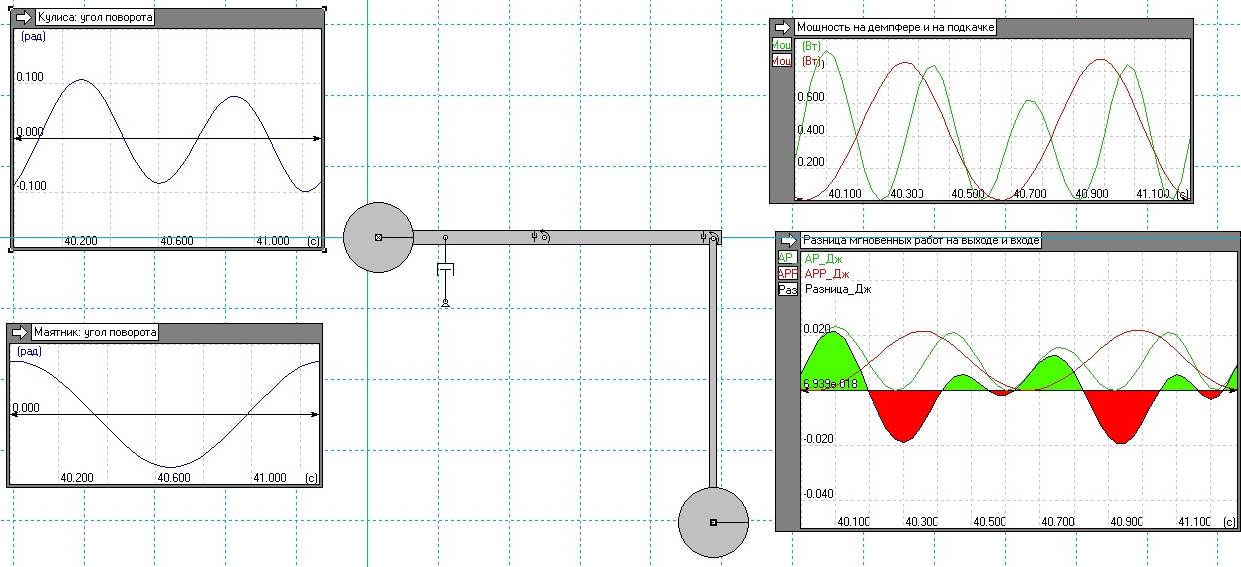
Рис. 3 Разница мгновенных работ на демпфере (выходе - зелёным) и на подкачке (входе – красным)
Результаты интегрирования представлены на рисунке 4.
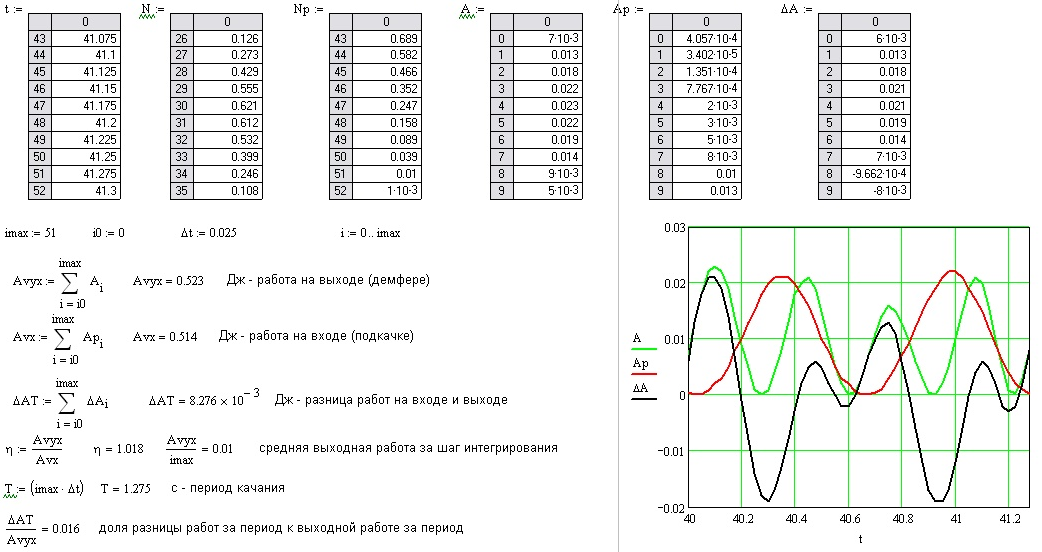
Рис. 4 Результаты интегрирования
Как видим, разница «выигрыша» и «проигрыша» составляет 0, 008 Дж, что меньше чем средняя работа за шаг интегрирования (0,010 Дж). Это говорит о том, что разница на уровне ошибки интегрирования и реального выигрыша нет.
3. Выводы
1) Параметры механизма маятника были выбраны во многом случайным образом, только лишь с целью его стабильной работы (автоколебания). По этим выбранным параметрам при моделировании в ЖФ выигрыша в выходной работе по отношению ко входной за период работы маятника нет.
2) Казалось бы, тему можно закрыть, но одно наблюдение заставляет задуматься о природе таких колебаний, когда входной импульс передаётся не мгновенно, а за достаточно ощутимый по отношению к единице жизни маятника (периоду его колебания) период времени. Это смещение «выигрышей» (зелёное на рис. 3) и «проигрышей» (красное). Скорее сего это связано с моментом инерции элементов механизма (кулисы, груза и т.д). Это наблюдение наталкивает на мысль, что маятник Милковича более открытая система, чем простой удлинённый рычаг, в котором импульс передаётся почти мгновенно. Ведь пока длится период «выигрыша» с параметрами окружающей среды могут происходить изменения, приводящие к изменению поведения маятника. Или эти изменения могут быть вызваны искусственно.
3) Следует глубже исследовать работу механизма на предмет дисперсионного анализа его параметров, т.е. провести планирование эксперимента, что в ЖФ сделать гораздо быстрее, чем в натуре.
4) Полезная нагрузка в виде демпфера может быть не «пассивной», а «активной», т.е. иметь закон изменения, например, коэффициента демпфирования созвучным (синхронным) с колебанием кулисы.
5) Возникло некоторое определение маятника Милковича – это «надломленный» простой рычаг, которым Архимед готов был перевернуть мир. Действительно, если провести обратную операцию – повернуть маятник до уровня кулисы, закрепить его, убрать массы противовеса и маятника (уравновесить), задать нужную знакопеременную нагрузку – мы получим простой рычаг с теми же выходными параметрами, но на котором импульс передаётся мгновенно. (рис. 5). Только маятник Милковича несколько более компактен.
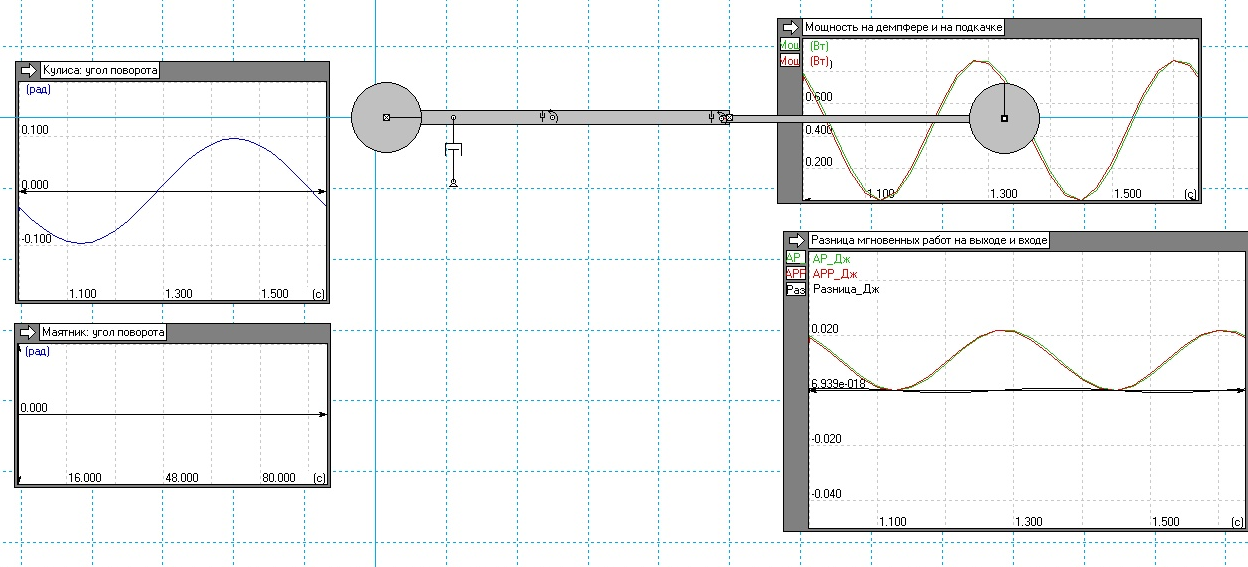
Рис.5 Простой рычаг с теми же выходными параметрами, что и маятник Милковича
Рассмотрев за одно и тоже время (период работы маятника Милковича) подкачивающую силу как для маятника Милковича, так и для простого рычага (рис.6), видим, что работа за период одинакова (в пределах ошибки интегрирования), а вот у Милковича - почти в 2,7 раза меньше, чем у простого рычага. Вообще импульс силы в любом преобразователе (например, рычаг в механике твёрдого тела, гидродомкрат в гидравлике, тепловой насос в теплотехнике, электротрансформатор в электротехнике) разный на «плечах» преобразователя.
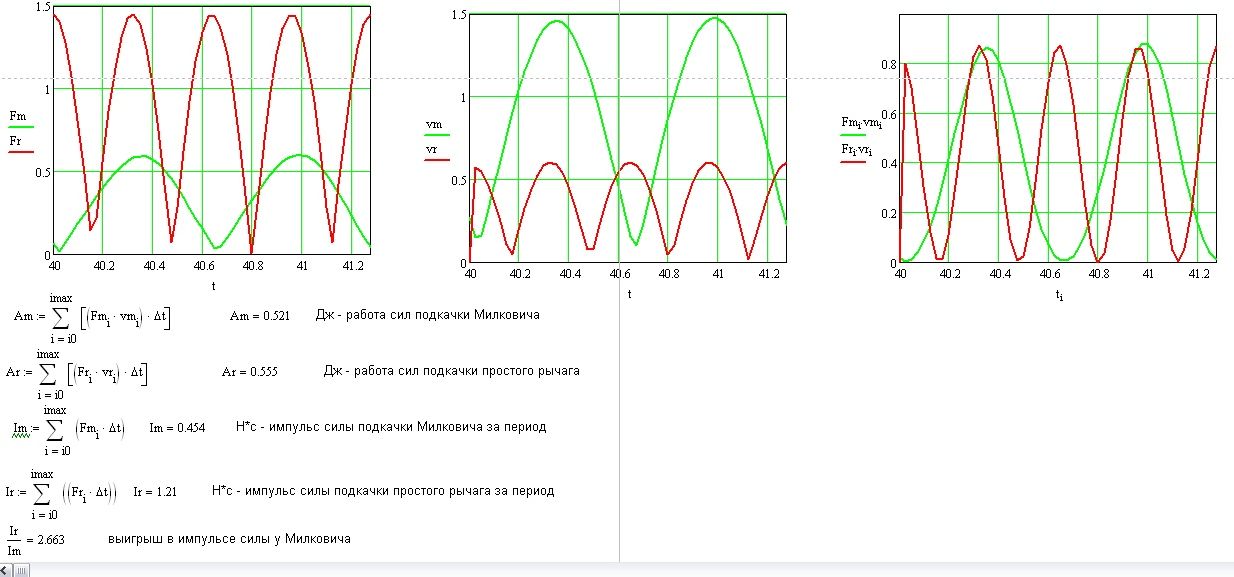
Рис.6 Выигрыш в импульсе силы у маятника Милковича. Зелёным – подкачка у маятника Милковича, красным – у простого рычага. F – силы, v – скорости, F*v – мощности.
Таблица 1. Результаты эксперимента за период работы маятника Милковича
|
Время, с |
Мгновенная мощность демпфера, Вт |
Мгновенная мощность подкачки, Вт |
Работа демпфера за шаг времени, Дж |
Работа подкачки за шаг времени, Дж |
Разница работ демпфера и подкачки за шаг времени, Дж |
Угол поворота кулисы, рад |
Угол поворота маятника, рад |
|
40.000 |
0.266 |
0.016 |
0.007 |
4.057e-004 |
0.006 |
-0.084 |
0.755 |
|
40.025 |
0.504 |
0.001 |
0.013 |
3.402e-005 |
0.013 |
-0.068 |
0.759 |
|
40.050 |
0.725 |
0.005 |
0.018 |
1.351e-004 |
0.018 |
-0.048 |
0.750 |
|
40.075 |
0.878 |
0.031 |
0.022 |
7.767e-004 |
0.021 |
-0.026 |
0.731 |
|
40.100 |
0.934 |
0.075 |
0.023 |
0.002 |
0.021 |
-0.002 |
0.701 |
|
40.125 |
0.889 |
0.137 |
0.022 |
0.003 |
0.019 |
0.023 |
0.660 |
|
40.150 |
0.758 |
0.215 |
0.019 |
0.005 |
0.014 |
0.046 |
0.611 |
|
40.175 |
0.573 |
0.307 |
0.014 |
0.008 |
0.007 |
0.066 |
0.554 |
|
40.200 |
0.370 |
0.408 |
0.009 |
0.010 |
-9.662e-004 |
0.084 |
0.490 |
|
40.225 |
0.186 |
0.514 |
0.005 |
0.013 |
-0.008 |
0.097 |
0.419 |
|
40.250 |
0.055 |
0.617 |
0.001 |
0.015 |
-0.014 |
0.105 |
0.342 |
|
40.275 |
7.423e-004 |
0.711 |
1.856e-005 |
0.018 |
-0.018 |
0.109 |
0.260 |
|
40.300 |
0.034 |
0.787 |
8.390e-004 |
0.020 |
-0.019 |
0.107 |
0.174 |
|
40.325 |
0.149 |
0.838 |
0.004 |
0.021 |
-0.017 |
0.100 |
0.085 |
|
40.350 |
0.325 |
0.860 |
0.008 |
0.021 |
-0.013 |
0.087 |
-0.006 |
|
40.375 |
0.525 |
0.848 |
0.013 |
0.021 |
-0.008 |
0.071 |
-0.097 |
|
40.400 |
0.703 |
0.804 |
0.018 |
0.020 |
-0.003 |
0.051 |
-0.188 |
|
40.425 |
0.816 |
0.731 |
0.020 |
0.018 |
0.002 |
0.029 |
-0.277 |
|
40.450 |
0.836 |
0.636 |
0.021 |
0.016 |
0.005 |
0.006 |
-0.363 |
|
40.475 |
0.758 |
0.528 |
0.019 |
0.013 |
0.006 |
-0.017 |
-0.443 |
|
40.500 |
0.600 |
0.417 |
0.015 |
0.010 |
0.005 |
-0.038 |
-0.517 |
|
40.525 |
0.401 |
0.309 |
0.010 |
0.008 |
0.002 |
-0.056 |
-0.583 |
|
40.550 |
0.209 |
0.213 |
0.005 |
0.005 |
-1.026e-004 |
-0.069 |
-0.639 |
|
40.575 |
0.066 |
0.132 |
0.002 |
0.003 |
-0.002 |
-0.079 |
-0.685 |
|
40.600 |
0.002 |
0.070 |
5.311e-005 |
0.002 |
-0.002 |
-0.082 |
-0.721 |
|
40.625 |
0.026 |
0.028 |
6.574e-004 |
6.880e-004 |
-3.055e-005 |
-0.081 |
-0.744 |
|
40.650 |
0.126 |
0.004 |
0.003 |
1.116e-004 |
0.003 |
-0.074 |
-0.755 |
|
40.675 |
0.273 |
0.001 |
0.007 |
3.161e-005 |
0.007 |
-0.063 |
-0.755 |
|
40.700 |
0.429 |
0.020 |
0.011 |
4.965e-004 |
0.010 |
-0.048 |
-0.742 |
|
40.725 |
0.555 |
0.057 |
0.014 |
0.001 |
0.012 |
-0.030 |
-0.718 |
|
40.750 |
0.621 |
0.113 |
0.016 |
0.003 |
0.013 |
-0.011 |
-0.683 |
|
40.775 |
0.612 |
0.186 |
0.015 |
0.005 |
0.011 |
0.009 |
-0.637 |
|
40.800 |
0.532 |
0.274 |
0.013 |
0.007 |
0.006 |
0.028 |
-0.582 |
|
40.825 |
0.399 |
0.375 |
0.010 |
0.009 |
6.013e-004 |
0.046 |
-0.519 |
|
40.850 |
0.246 |
0.483 |
0.006 |
0.012 |
-0.006 |
0.060 |
-0.449 |
|
40.875 |
0.108 |
0.592 |
0.003 |
0.015 |
-0.012 |
0.070 |
-0.373 |
|
40.900 |
0.019 |
0.693 |
4.792e-004 |
0.017 |
-0.017 |
0.076 |
-0.291 |
|
40.925 |
0.004 |
0.779 |
1.010e-004 |
0.019 |
-0.019 |
0.077 |
-0.206 |
|
40.950 |
0.072 |
0.841 |
0.002 |
0.021 |
-0.019 |
0.073 |
-0.117 |
|
40.975 |
0.214 |
0.875 |
0.005 |
0.022 |
-0.017 |
0.064 |
-0.027 |
|
41.000 |
0.405 |
0.876 |
0.010 |
0.022 |
-0.012 |
0.050 |
0.065 |
|
41.025 |
0.607 |
0.843 |
0.015 |
0.021 |
-0.006 |
0.032 |
0.156 |
|
41.050 |
0.770 |
0.779 |
0.019 |
0.019 |
-2.259e-004 |
0.011 |
0.247 |
|
41.075 |
0.847 |
0.689 |
0.021 |
0.017 |
0.004 |
-0.012 |
0.335 |
|
41.100 |
0.807 |
0.582 |
0.020 |
0.015 |
0.006 |
-0.035 |
0.419 |
|
41.125 |
0.650 |
0.466 |
0.016 |
0.012 |
0.005 |
-0.057 |
0.497 |
|
41.150 |
0.418 |
0.352 |
0.010 |
0.009 |
0.002 |
-0.075 |
0.568 |
|
41.175 |
0.184 |
0.247 |
0.005 |
0.006 |
-0.002 |
-0.089 |
0.629 |
|
41.200 |
0.030 |
0.158 |
7.563e-004 |
0.004 |
-0.003 |
-0.097 |
0.680 |
|
41.225 |
0.009 |
0.089 |
2.235e-004 |
0.002 |
-0.002 |
-0.098 |
0.718 |
|
41.250 |
0.124 |
0.039 |
0.003 |
9.841e-004 |
0.002 |
-0.092 |
0.744 |
|
41.275 |
0.333 |
0.010 |
0.008 |
2.435e-004 |
0.008 |
-0.080 |
0.757 |
|
41.300 |
0.573 |
0.001 |
0.014 |
3.440e-005 |
0.014 |
-0.063 |
0.758 |