Власов В.Н
Моделирование колеса и маятника Бесслера.
Мной уже было сделано несколько попыток понять механизм вращения колеса Бесслера. Эта тайна не дает покоя многим исследователям в течение 3-х столетий. Пока разгадать, как работает это колесо, до конца не удалось никому. Было сделано много фейковых моделей, которые на видео прекрасно вращались, но никто не сообщил, что хотя бы одну из этих моделей удалось превратить в промышленный образец, а тем более в массово выпускаемый товар для промышленности и населения. На рис.1 показана одна из таких моделей.

Рис.1. Фейковая модель колеса Бесслера.
Вот видео, где, якобы, это колесо вращается.
Что позволяет мне утверждать - это обманка? Во-первых, проводя своё моделирование в программе «Живая физика», я понял, что есть несколько моментов, которые никак нельзя обойти. Во-первых, чтобы раскрутить колесо Бесслера с помощью параметрического маятника, у которого начальная амплитуда небольшая, требуется не менее 10-30 минут в зависимости от параметров маятника. Кроме того, колесо вращается неравномерно и при увеличении частоты вращения неравномерность вращения колеса только нарастает. Так что, пояснение самого Бесслера, что маятники нужны ему для стабилизации частоты вращения, возможно, были сделаны для отвлечения внимания любопытных от истинного механизма вращения колеса. Хотя, учитывая, что маятников было два, он, скорее всего, был прав, если они работали с фазовым смещением в 180 градусов. Проверить мне это пока не удалось, ибо «Живая физика» позволяет моделировать только плоские модели, а тут, видимо, надо создавать пространственную модель. Или придумывать некий аналог, который уже не будет похож на колесо Бесслера.
Во-вторых, колесо на видео сразу начинает вращаться, будучи освобожденной от замка. Но это невозможно, так как очевидцы писали, что для запуска колеса его надо крутануть принудительно и так, чтобы оно при этом сделало не менее 1-2-х оборотов. И только после этого колесо уже начинало вращаться, набирая мощность. А с колесом начинали колебаться и маятники.
Вот как выглядел экран (вырезка окна) программы «Живая физика» с моделью колеса Бесслера с одним параметрическим маятником. (рис.2)
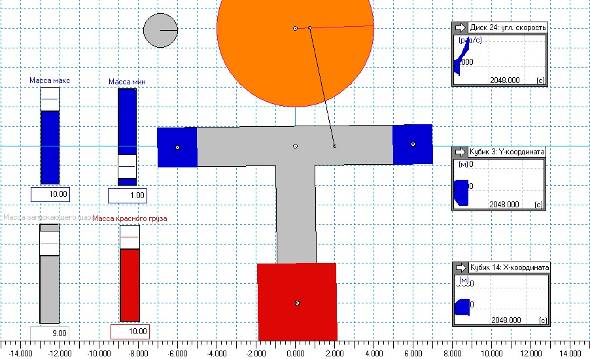
Рис.2. Моделирование колеса Бесслера в программе «Живая физика».
Модель состоит из колеса (маховика) оранжевого цвета. Диаметр колеса 8 метров, масса 20 кг. Ниже колеса находится параметрический маятник серого цвета. На концах горизонтальной поперечины маятника находятся грузы синего цвета, масса которых может изменяться от 1 до 10 кг в зависимости от того, как они расположены относительно горизонтали, проходящей через ось маятника. Длина поперечной части маятника 14 м. Об этом чуть ниже. Внизу маятника расположен груз, масса которого равна 10 кг. Длина маятника 10 м. Маятник вращает колесо с помощью шатуна. Для запуска маятника в качестве первичного импульса используется серый шар диаметром почти 2 м и массой в 9 кг.
На левой стороне рисунка располагаются регуляторы, которые позволяют изменять некоторые параметры – максимальную и минимальную массу синих грузов (от 0 до 10 кг), массу красного груза от 0 до 10 кг, массу серого шара от 0 до 10 кг. Моделирование показало, что результат сильно зависит от выбранных параметров грузов. И в зависимости от выбранных параметров грузов, от запуска процесса до того момента, когда колесо начнет вращаться, требуется время от нескольких минут до часа. Но сильно я на этом голову себе не забивал, а выбирал параметры грузов, исходя из здравого смысла. Но обратил внимание, что чем сильнее различие между максимальной и минимальной массой у синих грузов, тем быстрее колесо выходило на рабочий режим.
В правой части рис.2. показаны индикаторы. На первом сверху индикаторе показывается угловая скорость вращения оранжевого колеса. Видно, что после запуска процесса колесо колеблется «туда-сюда» в течение нескольких минут, а затем начинает вращаться уже в одну сторону против часовой стрелки, постепенно увеличивая среднюю угловую скорость. Но при этом видно, что угловая скорость колеса сильно колеблется от минимума до максимума. И чем больше угловая скорость, тем больше неравномерность вращения. Нагрузку на колесо я не задавал, возможно, это бы позволило стабилизировать скорость вращения колеса. Предлагаю это сделать читателям.
На втором сверху индикаторе регистрируется амплитуда колебания синих грузов по вертикали. Видно, что вначале амплитуда постепенно растёт, а затем, когда колесо начинает вращаться в одну сторону, амплитуда стабилизируется. На нижнем индикаторе регистрируется горизонтальная амплитуда колебаний красного груза. Тоже видно, что амплитуда постепенно нарастает, и как только колесо начинает вращаться в одну сторону, амплитуда стабилизируется.
Вначале я неверно предположил, что в модель надо заложить требование, чтобы, когда груз находится ниже горизонтали, проходящей через ось вращения маятника, то его масса должна увеличиваться. А когда груз находится выше горизонтали, то его масса должна уменьшаться. Но моделирование показало, что нарастания амплитуды колебаний у такого маятника не происходило. Тогда я сделал так, чтобы в модели при подъёме синего груза выше горизонтали масса его возрастала до максимальной массы, а при опускании ниже горизонтали масса синего груза снижалась до минимального значения, значения которых устанавливались на регуляторах. В данном случае максимальная масса равна 10 кг, а минимальная – 1 кг. И такой параметрический маятник заработал и начал набирать амплитуду после начального толчка.
Возникла некоторая эйфория от полученного результата. Вот мол, вечный двигатель. Но так как изменение массы грузов на концах «качелей» получалось противоестественное, то пришлось думать, как можно это всё реализовать. Одна из идей – перемещение дополнительного груза от одного конца «качелей» к другому в тот момент, когда «качели» горизонтальные. Но для этого требуется время, наличия дополнительных сил, появятся некие ускорения, и всё это может дать совершенно другой результат, чем тот на который я надеялся вначале.
Можно, предположил я, вообще не смещать дополнительный груз. А установить его так, чтобы при подъеме конца горизонтали маятника она просто поднимала уже заранее установленный на специальной платформе груз. Когда конец маятника будет опускаться вниз и примет горизонтальное положение, и груз, зафиксировавшись на прежнем месте, отделится от конца маятника. И далее опускаться конец маятника будет уже без груза. Тут уже всё можно сделать так, что никакого грохота не будет. Например, подвесить груз в мешке, а сам мешок сделать таким, чтобы он гасил удар от конца маятника. И тогда при подъеме конец маятника просто будет поднимать мешок с грузом, висящий на тросе, а когда конец маятника начнет опускать вниз, то мешок с грузом останется висеть, ожидая нового «подхода» этого же конца маятника.
Была проведена попытка смоделировать маятник типа Бесслера, но с подвешенными грузами. Была надежда, что это приведет к появлению параметрического резонанса, так как масса грузов на концах качелей (поперечной части маятника) вроде бы должна изменяться так же, как и в первой математической модели. Если конец поднимается выше горизонтали, проходящей через ось маятника, то его масса увеличивается на некую «добавку», а если конец оказывается ниже горизонтали, то восстанавливается первоначальный вес. Для этого была собрана следующая модель, как на рис.3.
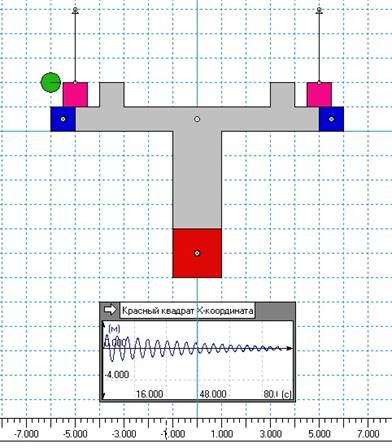
Рис.3. Модель маятника Бесслера, второй вариант.
Результат моделирования отражён на индикаторе в нижней части рисунка. На нём показано, как изменяется со временем амплитуда красного груза вдоль горизонтальной оси координат. Результат для меня был неутешительный – колебания после первичного толчка затухают. Это показывает, что более или менее реалистическая модель, в которой масса изменяется в результате взаимодействия «реальных» грузов, отличается от результата моделирования, где масса грузов на концах «качелей» изменяется чисто математически. То есть, массовая добавка как бы ниоткуда появляется и в никуда исчезает без появления положенных для такого случая сил инерции.
Значит ли это, что реализовать механизм изменения масс концевых грузов без появления сил инерции невозможно? Возможно, что в ближайшее время это не получится, так как наука еще не знает случаев превращения вещества в пустоту и получения вещества из пустоты. Но есть надежда, что такая возможность появится в отдалённом будущем. А пока нам остается поставить перед физикой задачу – научиться создавать новое вещество и уничтожать его без появления сил инерции и разного рода взрывов и т.п.
Если представить на физическом уровне, как можно реализовать рассмотренный выше механизм параметрических колебаний, то ясно, что его суть состоит в том, что часть вещества (массы) в определённый момент переносится из одного груза в другой справа налево или слева направо. Это меняет положение центра тяжести, а значит и момент инерции маятника. Причем эти изменения направлены на то, что изменение момента инерции заставляет поднимающийся край «качелей» маятника подняться еще выше. Но можно предположить, что этот груз переносится вдоль некого горизонтальной полуокружности, по некой направляющей, которая возникает в нужный момент времени, что позволит перенести массу без особых затрат энергии. Или, если эта энергия будет затрачена, то большая часть её в итоге будет рекуперирована для проведения следующего перемещения массы в обратном направлении.
Одновременно эту же задачу можно рассматривать как возможность того, что у параметрического маятника одна из сторон относительно вертикальной оси симметрии всегда будет массивнее другой, но в определённые моменты времени эти половины будут меняться местами. И опять возникает вопрос – как это сделать без затрат энергии или с использованием механизма рекуперации энергии.
Ясно, что подключаемая масса должна иметь в момент соединения с концом маятника ту же скорость и направление движения, что и конец маятника. И тут уже есть над чем задуматься, чтобы реализовать подобный параметрический резонанс. Но, скорее всего, технически это будет сделать сложно.
Но можно поступить по-другому. Взять за основу не изменение массы синих грузов, а смещение их вдоль «горизонтальной» перекладины («качелей») маятника – удалять от оси маятника или приближать к ней. В этом случае будет увеличиваться или уменьшаться момент инерции этого груза, что даст для маятника тот же эффект. Механически это сделать, да еще без привлечения других сил, похоже, сложно, но…
Примерно это можно сделать так. Пусть грузы на концах «качелей» получат возможность смещаться от конца к центру и обратно. Тогда груз к центру можно притягивать с помощью троса, а возвращаться на прежнюю позицию он мог бы под действием пружины. Можно так соединить грузы тросами, что смещение одного груза к центру (к оси маятника) будет сопровождаться смещением противоположного груза к краю «поперечины». Вопрос - как это сделать?
Так как ось вращающегося маятника неподвижна и не вращается, то на эту ось можно «посадить» шкив, жестко, закрепленный с осью. Тогда останется закрепить один конец троса в нижней точке шкива, обвернуть тросом шкив с правой стороны и от верхней точки шкива протянуть трос к левому грузу. Теперь, если левый конец маятника с грузом будет подниматься, то «свободная длина» троса будет удлиняться, а груз под действием пружины будет отодвигаться к краю «поперечины». При опускании края поперечины ниже горизонтали длина свободной части троса будет укорачиваться, и груз будет перемещаться ближе к оси маятника. То же самое можно проделать с другим грузом, и тогда, когда на одном конце груз будет опускаться, он одновременно будет смещаться к центру, а на другом конце груз будет подниматься и удаляться от оси вращения маятника. Естественно, энергию для этого маятник будет брать из гравитационного поля (или за счет гравитационного поля) Земли. Придется, видимо, повозится с подбором масс грузов, как синих, так и красного. Да и геометрические параметры маятника придется подбирать либо методом проб и ошибок, либо на основе математической модели.
Но можно в дополнение к механике привлечь электростатику или электромагниты. Модель такая была в «Живой физике» создана (рис.4).
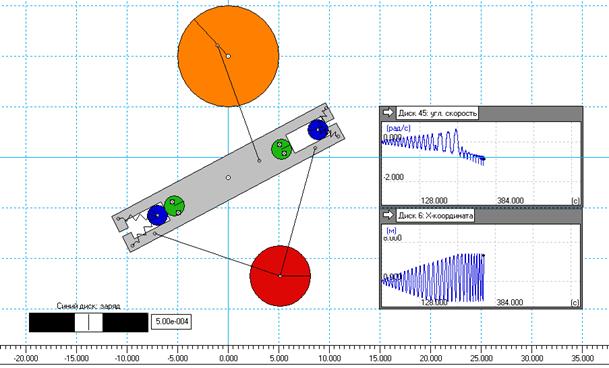
Рис.4. Модель маятника и колеса Орфира (Бесслера), третий вариант.
Как видно из рисунка габариты маятника и колеса выбраны большими. Диаметр оранжевого колеса 10 м, масса – 30 кг. Размах коромысла (качелей) маятника 20.8 м, масса самого коромысла 79 кг. Диметр зеленых дисков 2 м, их масса – 3 кг, заряд 0.001 к. Диаметр синих дисков 2 м, масса – 3 кг, заряд меняется в зависимости от того, ниже или выше находится центр этого диска относительно горизонтальной линии, проходящей через ось маятника. Если центр синего диска располагается ниже указанной линии, то его заряд (отрицательный) равен -5е-4 к. Поэтому ниже указанной горизонтальной линии синий диск притягивается к зеленому диску. Если же центр синего диска располагается выше указанной линии, то заряд ( положительный) синего диска равен 5е-4 к. Поэтому в этом случае синий диск отталкивается от зеленого на максимально возможное расстояние. Величины зарядов выбраны произвольно и только с целью, чтобы это обеспечивало перемещение грузов необходимые позиции. Пружины выполняют чисто вспомогательные роли – удерживают синие диски от нежелательного перемещения и обеспечивают их перемещение вдоль коромысла маятника.
Масса красного диска 10 кг, но можно было выбрать и другую массу. Это только бы отразилось на времени выхода маятника на вращение оранжевого диска, а также отразилось бы на полной энергии маятника, которая непрерывно увеличивается, если судить по результатам моделирования.
Результат моделирования прекрасно виден на рис.4. Верхний индикатор показывает угловую скорость оранжевого колеса – колеса Орфира. А амплитуда колебаний самого маятника, а точнее красного шара (диска) показана на нижнем индикаторе. Видно, что когда колесо начинало вращаться, амплитуда красного диска вдоль горизонтальной оси перестала нарастать, но зато начала нарастать частота колебаний и, соответственно, угловая скорость вращения оранжевого колеса. А это указывает на рост мощности системы из маятника и маховика. Значит, с такой системы можно избыточную мощность снимать и направлять потребителю.
Можно отметить и такое явление, как рост неравномерности вращения, что указывает на то, что без нагрузки система обязательно развалится, если рост мощности не удастся остановить, например, направлением избытка мощности в нагрузку, введением в систему трения или увеличить массу красного диска. Как показывали мои более ранние модели, где параметрический резонанс достигался подобным способом, но для переключения параметров использовался другой критерий – скорость движения концов качелей по вертикали, точнее, отрицательность или положительность этого показателя. Теперь вот удалось обнаружить еще один способ управления параметрами физического маятника, о котором я пока еще нигде не читал. И для переключения «зарядов» на дисках потребуется очень простая электроника и даже обычный уровень.
Так что могу считать, что мне теоретически удалось сделать очень важное открытие и пока подтвердить его моделированием в «Живой физике». Как поведет такая система в реальных условиях, покажет будущее. Данное изобретение и открытие дарю всему человечеству, чтобы любой человек, используя очень простые материалы, мог бы собрать энергетическую установку, которая бы выдавала в сеть больше энергии, чем тратилось бы на управление – переключение, например, обмоток электромагнита, которые бы перемещали грузы вдоль «коромысла» маятника согласно предложенной схеме.
Теперь можно и выводы сделать. Изменяя правильным образом момент инерции грузов на концах коромысла маятника Бесслера, можно, затратив немного энергии на перемещение грузов или изменение их массы, раскачать маятник до большой мощности, и при этом раскрутить колесо (маховик) Бесслера до угловой скорости, достаточной для снятия излишков мощности в нагрузку. Вполне возможно, что Бесслер как раз это и осуществил. Ведь недаром он писал в своём трактате, что в основе его изобретения лежит божественная динамика неких грузов. Современники, дивясь на вращающееся колесо, не обращали внимание на маятники, которых было аж два на одно колесо. Хочешь спрятать – положи на самое видное место. Два маятника – это двойная мощность. Чем больших габаритов был маятник, тем более массивные грузы можно было разместить на таком маятнике. Мощность такого маятника, как известно, прямо пропорциональна моменту инерции и квадрату угловой скорости вращения. А так как колебания такого маятника никак не могли быть свободными, то раскачать их можно до любой разумной частоты.
В данной третьей модели использовались законы электростатики, но практически грузы из железа или стали проще будет перемещать с помощью электромагнитов. Достаточно будет подать на электромагнит короткий импульс, достаточный для перемещения синих грузов, а в остальное время ток можно отключать до тех пор, пока коромысло маятника опять не займет горизонтальное положение. А так как перемещение грузов будет осуществляться горизонтально, то и энергию на это, преодолевая только трение, придется тратить совсем немного.
Останется только решить вопрос о целесообразности производства таких маятников, чтобы сделать их производство как можно проще в техническом отношении и по возможности не дорого. По моим представлениям, любой, кто знает основы плотницкого дела и электротехники, сумеет сделать для себя такую энергетическую установку. Тем более ведь не обязательно для маховика использовать дерево. Достаточно взять уже готовое решение из металла. Остальное – дело техники. Со временем, думаю, инженеры сумеют подобрать для подобных маятников, как оптимальную конструкцию, так и материалы – металл, пластмассы, камень. Думаю, что камень для таких маятников будет в самый раз. Например, для нижнего груза только камень надо и использовать. А для грузов в коромысле уже можно использовать железо. И контролер подойдет самый простой. Можно и без электронного контролёра, если использовать нечто похожее на коллектор простого электродвигателя постоянного тока, посаженного на ось маятника.
Что касается самого колеса, на которое многие потратили целые жизни, чтобы разгадать механизм его вращения, то думаю, что это, при наличии параметрического маятника, - самый обычный маховик. Передавать энергию от маятника в маховик можно через храповой механизм, какой есть во втулке заднего колеса велосипеда. И этот маховик может быть уже самой разной конфигурации. Например, супермаховик Нурбея Гулиа. И тут уже можно использовать всё то, что наработал этот изобретатель – супермаховик и супервариатор. Короче, возможны самые неожиданные варианты. И один из таких вариантов я решил промоделировать, чтобы решить поставленную задачу до конца.
Было решено соединить два маятника, точнее две уже промоделированные качели. Одну расположить горизонтально, а вторую вертикально. Конструкция получилась в виде креста (рис.5). По сути, это уже колесо, результаты моделирования на котором уже можно смело распространить на любое колесо с любым числом парных грузов.
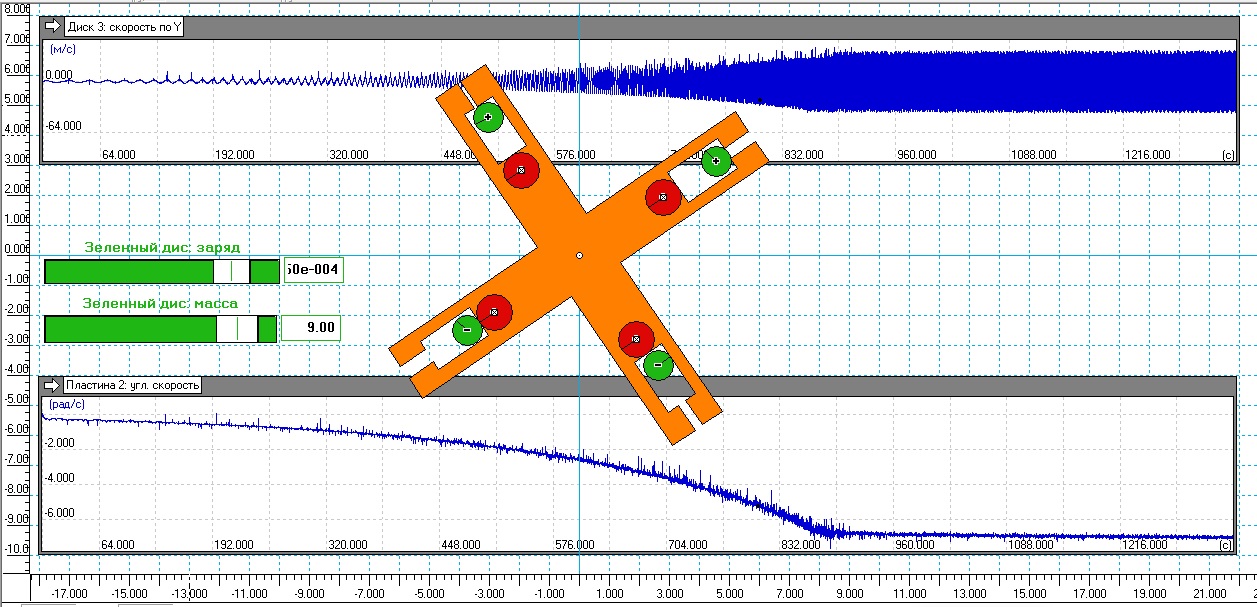
Рис.5
Вновь для перемещения грузов была задействована электростатика, как наиболее простое в данном случае решение. У красных дисков, к которым притягиваются и от которых отталкиваются зеленные диски, масса была задана в 10 кг, а заряд положительный в 0.001 к (кулона). Масса зеленных дисков 9 кг, заряд в зависимости от положения относительно оси колеса составляет по модулю 8е-004 к. Когда зеленый диск находится выше оси колеса (креста), то его заряд положительный, если ниже, то отрицательный.
Формулы в модель потребовались простые. Оказалось в свойствах «заряд» зеленного диска надо ввести такую формулу (1):
if(Body[3].p.y>0,input[26],-input[26]) (1)
Где Body[3].p.y – это положение центра зеленного диска под номером 3 относительно оси Y. А input[26] – это величина заряда этого диска, который набирается на регуляторе под номером 26. Когда знак заряда положительный зеленый диск отталкивается от красного. А это происходит при положительных значениях координаты Y. Если Y<=0, заряд зеленого диска отрицательный, и он притягивается к красному диску. Значения заряда выбрано при выбранных массах зеленных дисков таким, чтобы можно было довести вращение зеленного диска до достаточно высокой угловой скорости. При увеличении заряда максимальная угловая скорость диска увеличивается, так как для отрыва зеленного диска от красного потребуется более высокая угловая скорость (или частота).
И вот что получается при моделировании. Колесо вначале раскачивается. После переходит во вращение по часовой стрелке, набирая угловую скорость по параболе. Лучшего доказательства, что выбранный способ управления вращением колеса работает, и не придумаешь. И это тем более странно, так как вместо, казалось бы, того, чтобы перемещать зеленый груз в горизонтальном положении, например, влево, его, оказывается, надо перемещать вправо. А это приводит к тому, что колесо (крест) получает ускорение по направлению своего вращения с одной стороны и поддержанию состояния неустойчивого равновесия с другой.
Получается, что для получения параметрического резонанса колеса в поле тяжести необходимо производить изменение положения грузов относительно оси вращения колеса. То, что парные грузы должны находиться на горизонтальной прямой, это ясно. Так и было заложено в модель. Но теперь стало понятно, что это как раз соответствует всем требованиям параметрического резонанса. Положение грузов меняется в тот момент, когда вертикальная скорость груза максимальна. В том случае, если вектор скорости зеленного диска направлен вверх, то груз смещается от центра колеса на заданный отрезок. Если вектор скорости зелённого диска направлен вниз, то груз смещается ближе к центру колеса. Способ, вроде бы противоестественный, но благодаря именно такой динамики грузов, происходит "захват" энергии из гравитационного поля Земли и увеличение скорости вращения колеса.
Для такого колеса для перемещения грузов в нужный момент и в нужном месте не потребуется много энергии. Ибо смещение грузов происходит вдоль силовых линий гравитационного поля. На грузы (шары, диски, цилиндры) можно будет воздействовать как изнутри колеса, так и из вне. Самое простое решение – это электромагнит, а для фиксации груза в нужном положении придется придумать защелки. Можно попробовать энтузиастам модифицировать колесо Альдо Коста. У него переключения позиций грузов происходит внизу и вверху, а можно изменять положения грузов в крайних горизонтальных точках – слева и справа. И энергии для такого переключения потребуется меньше, так как уже не надо будет преодолевать силу тяжести.
Для контроля за ходом моделирования использовались два индикатора. На верхнем индикаторе выводилась вертикальная скорость зеленного диска. Максимальная скорость равна около 40м/с. А это означает, что именно с такой скоростью вращаются точки на окружности колеса. На нижнем индикаторе выводится угловая скорость креста (колеса). Видно, что скорость эта достигает примерно 7 рад/с. Причем четко видно, что скорость эта в конце моделирования практически не меняется. Это связано с влиянием центробежных сил. Именно в момент достижения максимальной угловой скорости цетробежная сила становится равной силе электростатического притяжения красного и зеленого диска. Дальнейшее увеличение угловой скорости колеса уже не происходит, так как зеленый диск теряет возможность перемещаться из одного крайнего положения к другому. Но это и к лучшему, так как означает, что появляется реальный регулятор угловой скорости вращения колеса. И поэтому принимать специальных мер, ограничивающих скорость вращения колеса, нет необходимости. Просто надо с самого начала расчитать параметры колеса и выбрать при его изготовлении материалы необходимой прочности.
Можно поломать извилины ради поиска решения механического, чтобы управлять перемещением и фиксацией грузов непосредственно изнутри колеса. Но главное, удалось получить неочевидное на первый взгляд техническое решение. Правда, такое в жизни встречается сплошь и рядом. Вся история человечества - непрерывная цепочка неожиданностей.
Кроме того, следует заметить, что это колесо будет одинаково вращаться хоть по часовой стрелке, хоть против неё. Оно полностью симметрично относительно направления вращения. Получается, что если соединить вместе колесо и маятники с одинаковым механизмом формирования параметрического резонанса можно значительно увеличить мощность энергии, которую удастся снимать с такой конструкции. Два коромысла в маятниках и 6-8-10 (можно и больше, в зависимости от габаритов колеса) – такое чудо уже игнорировать никак нельзя. А нижние грузы маятников будут, это подтверждает моделирование, накладывать ограничения на выдаваемую системой мощность, когда к ней не будет подключена нагрузка. Можно ограничиться параметрическим колесом и двумя простыми маятниками как раз для ограничения угловой скорости вращения колеса.
Для такого колеса характерным является стабилизация частоты вращения, когда центробежная сила, действующая на зеленные диски начинает превышать силу электростатического притяжения. Это подтвердается моделированием, которое было повторено не один раз и с разными параметрами - изменялись масса зеленых дисков и велична их заряда. Так что со стабилизацией частоты вращения у данного колеса всё в порядке.
На основе таких параметрических маятников и колёс, сопряженных с супермаховиками можно будет создавать электростанции с широким диапазоном мощностей. И тогда не надо будет ставить супермаховики на транспортные средства. Можно будет использовать для зарядки их аккумуляторов (супермаховиков) вырабатываемую стационарными параметрическими маятниками и колесами электроэнергию на специальных заправках. Или получать там же с помощью дармовой энергии водород, и использовать его в соответствующих двигателях.
Вот так моделирование колеса Бесслера превратилось в моделирование не только самого колеса, но и маятника Бесслера. Моделирование показало возможность промышленного производства таких колес и маятников. Теперь надо спросить у инженеров, почему они не строят вечные двигатели, использующие гравитационное поле Земли, если теоретическая механика давно позволяла это сделать? И почему ученые упорно твердят и продолжают твердить, что создать вечный двигатель невозможно. Нам ведь не нужен вечный двигатель как таковой. Нам нужен безтопливный источник энергии, извлекающий её из разного рода мощных полей, которые окружают всех нас – гравитационного, электростатического или магнитного. Получается, что извлекать такую энергию можно, и для этого надо организовать колебательный процесс по типу параметрического резонанса. Надо учиться управлять процессами извлечения энергии из окружающих нас полей и тогда перед нами откроются великие перспективы.
Думаю, что я этим простым устройством окончательно убил весь бизнес и производства, так или иначе основанные на добыче и использовании газа или нефти. Возможно, и атомная энергетика накроется медным тазом, как крайне опасная для жизни. Эта же судьба ждет и альтернативную энергетику, основанную на солнечной и ветровой энергии. Эра нефти и газа, опасного атома, солнечной и ветровой энергетики закончилась, начинается эра безтопливных источников энергии, опирающихся на гравитацию, электростатику и электромагнетизм. Думаю, что принцип понятен и прозрачен. Теоретически давно известны тесные связи между механическими и электростатическими (электротехническими) величинами. Так что, понимая, какие силы заставляет вращаться колесо и колебаться маятник, можно по принципу аналогии создать электрические, электромагнитные системы, где энергия будет вырабатываться за счет параметрического резонанса в электростатическом или магнитном поле Земли. Так как такой маятник или колесо можно установить в любой точке поверхности Земли или массивной планеты, то теперь можно будет производить энергию везде, и столько, сколько надо. И при этом энергетические системы смогут гибко подстраиваться под любую нагрузку, ибо любое колесо, любой параметрический генератор, в любой момент не составит труда остановить или запустить.
Можно смело утверждать, что Иоганн Эрнст Элиас Бесслер действительно сделал величайшее открытие почти 300 лет назад. 12 ноября 1717 года в присутствии известных физиков Орфиреус продемонстрировал своему покровителю ландграфу Карлу Гессен-Кассельскому изобретённый им «вечный двигатель», имевший вид полого колеса диаметром около четырёх метров и толщиной тридцать пять сантиметров. В 2017 году будет круглый юбилей этому событию. Считаю, что Бесслер мной полностью реабилитирован. Он не был шарлатаном. Он был величайшим гением своего времени, ибо нашел способ изменения положения грузов во вращающемся колесе, который приводил к раскрутке колеса, а не его остановке. Но так как его подход к этому был хоть и простым, но необычным, даже «противоестественным», то лучшие умы Европы не смогли понять его, а поверить тем более. Не исключаю, что способ параметрического управления вращением колеса, выбранный Бесслером, отличался от того, что показан в данной статье. Но то, что он был очень простым, я нисколько не сомневаюсь. Что-то мне подсказывает, что в колесе было 8 тяжелых грузов и восемь грузов поменьше. Тяжёлые грузы перемещались незначительно под действием силы тяжести, а с помощью системы рычагов, тросов и пружин приводили к существенным перемещениям легких грузов вдоль радиуса колеса. У Природы в рукаве еще много тузов.
Отныне в России официально больше не будет выполняться закон Паршева. Я и раньше показывал, что никакого закона Паршева нет, что холод (по крайней мере, умеренный) для экономики не помеха, если подойти к этому с умом. Что научно-техническое развитие России тормозится искусственно. И активную роль в этом принимают наши доморощенные либералы и мировая финансовая братия, финансовые ОПГ мирового масштаба – ФРС и Лондон-Сити. Теперь это стало окончательно ясно. Россия, только вперед!!! Энергетических преград для научно-технического рывка у тебя нет!!!
PS:
Вот таким может быть устройство, которое будет перемещать грузы в крыльях маятяника
по алгоритму Бесслера. И чем больше будет амплитуда колебаний маятника, тем сильнее
будет отклоняться подвижные грузы от оси и приближаться к оси. Тем сильнее будет параметрический
резонанс. Правда, придется следить, чтобы амплитуда колебаний такого маятника не
превышала 90 градусов.
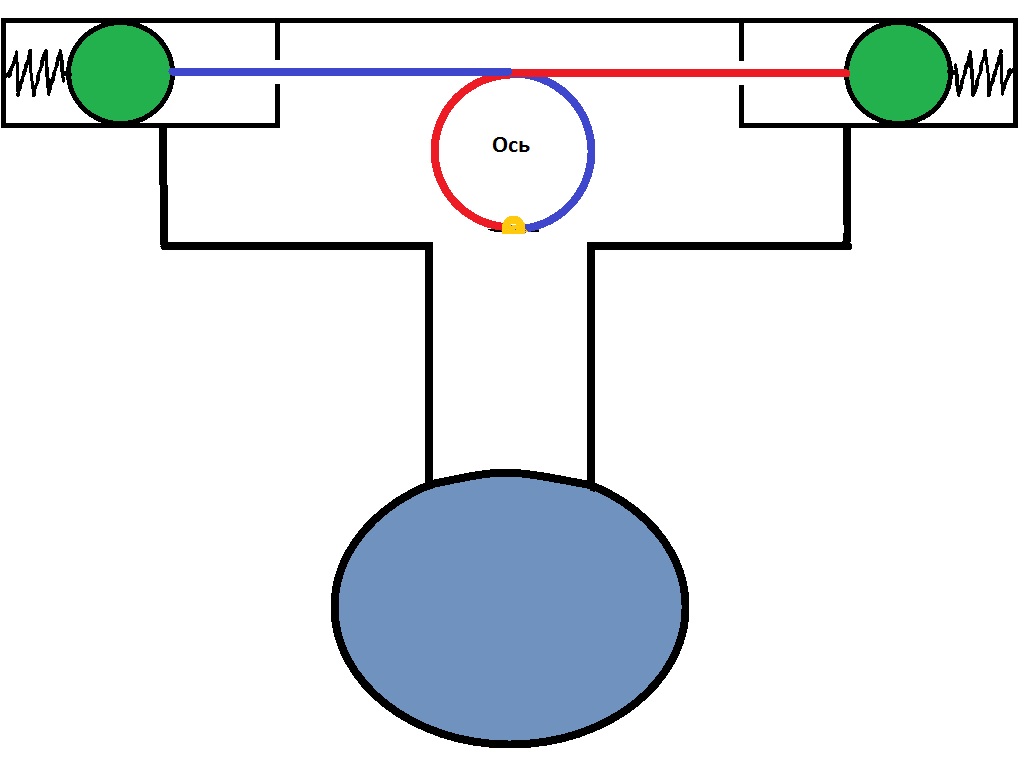
Ось такого маятника большого диаметра, но вместе с матником она не поворачивается. Большой диаметр оси (вала) выбран таким образом затем, чтобы намотать на него достаточно длинный трос. При отклонении маятника влево накручивается синий трос, поэтому левый груз приближается к оси маятника. Но одновременно правый груз из-за удлинения свободной части красного троса левый груз притягивается пружиной к концу правого крыла маятника. При отклонении маятника направо накручивается красный трос, поэтому правый груз поднимается и приближается к оси маятника, а в тоже время левый трос отматывается, и левый груз притягивается к краю левого крыла маятника.