Для того, чтобы читателю было ясно, как выглядит вечный двигатель Андрея Ермолы, приведу описание его патента, где есть рисунки, поясняющие как устроен его редуктор.
/*/
Редуктор содержит ведущий и ведомый валы , установленные в расточках корпуса соосно друг другу , на свободном конце ведущего вала установлен опорный подшипник, на ведущем валу со сдвигом в осевом направлении последовательно закреплены шнек и квадрат . Внешняя поверхность шнека соединена с охватывающей его втулкой , внешняя поверхность которой жестко соединена с водилом , жестко связанным с маховиком , а внешняя поверхность квадрата охвачена дополнительной втулкой , к которой прикреплен центрирующий диск , взаимодействующий с внутренней поверхностью корпуса через подшипники. Внутри маховика , эксцентрично последнем , установлено зубчатое колесо с внутренними зубьями , задето с шестерней , жестко прикрепленной к расточки корпуса в виде обечайки , связанной с маховиком с помощью кронштейна , один конец которого связан с помощью подшипников с наружной поверхностью обечайки ведомого вала , а второй конец свободно пропущен через маховик . Внутри обечайки размещены ведомый вал , выполненный коленчатым , выходной конец которого связан с ней через подшипники , а противоположный конец , в виде колена , жестко прикрепленный к упомянутой дополнительной втулки
Изобретение относится к машиностроению и может быть использована во всех отраслях для снижения частоты оборотов при передаче вращения с ведущего вала на ведомый с высоким передаточным отношением. Редуктор общемашиностроительного применения - это редуктор, отвечает техническим требованиям , общим для большинства случаев применения . Благодаря своей универсальности такие 5 редукторы успешно используются в подъемно - транспортных , лесозаготовительных машинах , металлургическом и угледобывающем оборудовании , энергомашиностроении , строительной индустрии , нефтяной и газодобывающей промышленности , сельскохозяйственном и перерабатывающем машиностроении . Известный редуктор [ авт. св . СССР N 654820 , МПК F16Н 21 /42 , 1976 г. ] , содержащий 10 эксцентриковый устройство , преобразующий вращение ведущего вала в колебательное движение рычага , а затем через муфту свободного хода во вращение ведомого вала . Однако муфты свободного хода кроме эксцентриков и рычагов требуют устройств заклинивают в одну сторону и видклинюють в другую , - это ролики , пружина и т.д. Ролики создают значительные удельные давления и ускоряют износ поверхности сцепления на ведомом валу . Для 15 содержание ведомого вала нужно несколько муфт , для продолжения вращения на время отключения первой муфты или для удержания от обратного вращения, а для реверсирования еще один комплект таких же муфт. Это обусловливает сложность устройства и не позволяет применять для передачи больших мощностей . Известен также наиболее близкий к предлагаемому эксцентриковый редуктор , [ патент РФ 20 № 2025621 , МПК 5 F16H 19 /00 , F16H 27/ 04 , опубл . 30.12.1994 ] , содержащий установленные в расточках корпуса ведущий вал и ведомый вал , на котором закреплен маховик , при этом он содержит ползун , закрепленный на ведущем валу эксцентрик , установленный в ползуне с возможностью вращения , на ведомом валу закреплен маховик , на одном конце ползуна выполнен сквозной паз для размещения в последнем или оси , или ведомого вала , а другой 25 конец ползуна имеет поверхность соответствующую поверхности маховика для взаимодействия с последней. Недостатком описанного редуктора является сложность в изготовлении , высокая себестоимость , невозможность работы с высоким передаточным соотношением и недостаточно высокий коэффициент полезного действия в связи с тем , что наличие ползуна может привести к дисбалансу , т.е. неуравновешенности вращающихся частей редуктора . 30 В основу данной полезной модели поставлена ??задача создания простого в изготовлении , надежного и дешевого редуктора с большим передаточным отношением , высоким коэффициентом полезного действия , способного передавать нагрузку , сопоставимые с традиционными планетарными редукторами при малых габаритах , характерных для редукторов с малой разницей чисел зубьев колес , а также повышение ресурса работы за счет исключения дисбаланса , то есть 35 неуравновешенности вращающихся частей редуктора . Для решения этой задачи в редукторе , содержащий установленные в расточках корпуса ведущий вал и ведомый вал , на котором закреплен маховик , согласно полезной модели , ведущий и ведомый валы установлены соосно друг другу , на свободном , выступающем за пределы корпуса конце ведущего вала, имеет возможность осевого перемещения , установлен опорный 40 подшипник , кроме того , на ведущем валу со сдвигом в осевом направлении закреплены шнек и квадрат , внешняя поверхность шнека соединена с охватывающей его втулкой , внешняя поверхность которой в свою очередь жестко соединена с водилом , жестко н ' связанным с маховиком , а внешняя поверхность квадрата охвачена дополнительной втулкой , к которой прикреплен центрирующий диск , взаимодействующий с внутренней поверхностью корпуса через подшипники , при этом втулка и 45 дополнительная втулка могут автономного проворота во взаимно противоположном направлении ; внутри маховика , эксцентрично последнем , установленное зубчатое колесо с внутренними зубьями , задето с шестерней , жестко прикрепленной к расточки корпуса в виде обечайки , связанной с маховиком с помощью кронштейна , один конец которого связан с помощью подшипников с наружной поверхностью обечайки ведомого вала , а второй конец 50 свободно пропущен через маховик , внутри обечайки находится ведомый вал , выполненный коленчатым , выходной конец которого связан с ней через подшипники , а противоположный конец в виде колена жестко прикреплен к упомянутой дополнительной втулки , при этом ось вращения конца ведомого вала в виде колена , связанного с внутренней частью зубчатого колеса через подшипники , совпадает с осью вращения зубчатого колеса. 55 Предлагаемый редуктор обеспечивает возможность на одной степени достигать значительных передаточных соотношений , что позволяет уменьшить его габариты , сделать дешевым , простым и более надежным по сравнению с редуктором по ближайшим аналогом , кроме того , он не сложен в изготовлении , что снижает его себестоимость , также обеспечивается возможность работы с высоким передаточным соотношением , а в связи с отсутствием ползуна исключается дисбаланс , т.е. 60
UA 83284 U
2
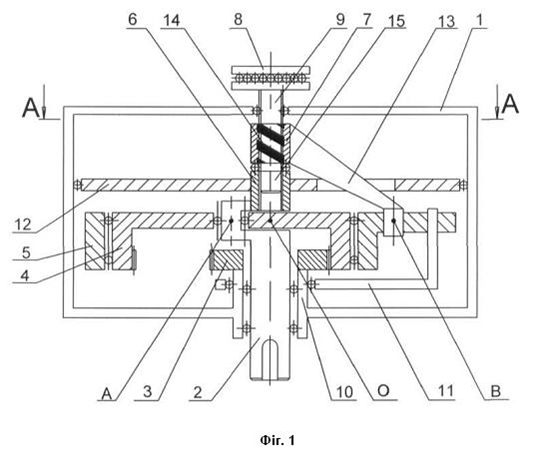
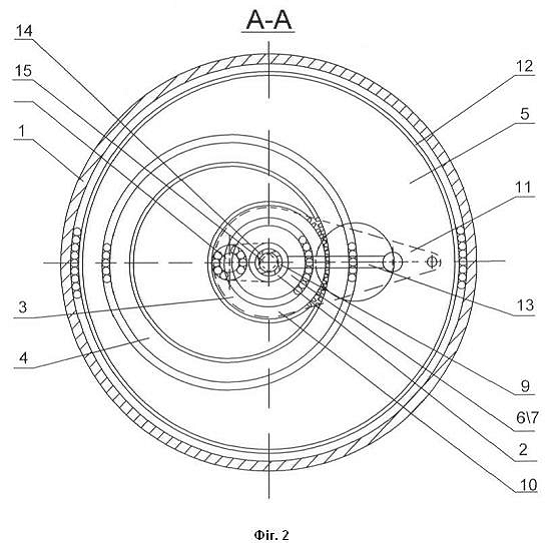
неуравновешенность вращающихся частей редуктора и , как следствие , повышается коэффициент полезного действия . На фиг . 1 представлен общий вид предлагаемого редуктора , на фиг . 2 разрез по А - А на фиг . 1 . Редуктор содержит установленный в расточках корпуса 1 , ведущий вал 9 и ведомый вал 2 , 5 котором закреплен маховик 5 , согласно полезной модели , ведущий вал 9 и ведомый вал 2 установлены соосно друг другу , на свободном , выступающем за пределы корпуса 1 , концы ведущего вала 9 , имеющий возможность осевого перемещения , установлен опорный подшипник 8 , кроме того , на ведущем валу 9 со сдвигом в осевом направлении последовательно закреплены шнек 14 и квадрат 15 внешняя поверхность шнека 14 соединена с охватывающей его втулкой 7 , наружная поверхность 10 которой в свою очередь жестко соединена с водилом 13 жестко связанным с маховиком 5 , а внешняя поверхность квадрата 15 охвачена дополнительной втулкой 6 , к которой прикреплен центрирующий диск 12 взаимодействующий с внутренней поверхностью корпуса 1 через подшипники , при этом втулка 6 и дополнительная втулка 7 имеют возможность автономного вращения во взаимно противоположном направлении ; внутри маховика 5 , эксцентрично последнем , установлено зубчатое колесо 4 из 15 внутренними зубьями , задето с шестерней 3 , жестко прикрепленной к расточки корпуса 1 в виде обечайки 10 связанной с маховиком 5 с помощью кронштейна 11 , один конец которого связан с помощью подшипников с наружной поверхностью обечайки 10 ведомого вала 2 , а второй конец которого свободно пропущен через маховик 5 , внутри обечайки 10 размещено ведомый вал 2 , выполненный коленчатым , выходной конец которого связан с ней через подшипники , 20 а противоположный конец в виде колена жестко прикреплен к упомянутой дополнительной втулки 6 , при этом ось вращения конца ведомого вала 2 в виде колена , связанного с внутренней частью зубчатого колеса 4 через подшипники , совпадает с осью вращения зубчатого колеса 4 . Предлагаемый редуктор работает так . 25 Посему опорный подшипник 8 с помощью домкрата или вручную прикладывается осевое усилие на ведущий вал 9 , в результате чего втулка 7 и дополнительная втулка 6 , находящихся в зацеплении соответственно со шнеком 14 и квадратом 15 пытаются провернуться во взаимно противоположных направлениях , ( направление поворота по или против часовой стрелки зависит от направления ленты шнека ) ??, при этом втулка 7 , наружная поверхность которой жестко соединена с 30 водилом 13 приводит водилом 13 маховик 5 во вращательное движение , а дополнительная втулка 6 , жестко связана с коленом 15 ведомого вала 2 , приводит последний также во вращательное движение , при этом создается усилие в точке " в" меньшего усилия, возникающего в точке " А ", в результате этого зубчатое колесо 4 с внутренними зубьями , находящееся в зацеплении с шестерней 3 , вращается и приводит во вращение маховик 5 . Маховик 5 при этом останавливает дальнейшее 35 опускания ведущего вала 9 , а осевое усилие на втулку 7 и дополнительную втулку 6 остается неизменным , зубчатое колесо 4 вследствие его эксцентричного расположения относительно оси вращения ведущего 9 и ведомого 2 валов обеспечивает передачу крутящего момента на ведомый вал 2 . Центрирующий диск 12 , который охватывает дополнительную втулку 6 , взаимодействует с внутренней поверхностью корпуса 1 через подшипники и центрирует ведущий вал 9 относительно ведомого вала 2 . 40
ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ
Редуктор , содержащий установленный в расточках корпуса 1 ведущий вал 9 и ведомый вал 2 , на котором закреплен маховик 5 , отличающийся тем , что ведущий вал 9 и ведомый вал 2 45 установлены соосно друг другу , на свободном , выступающем за пределы корпуса 1 , конце ведущего вала 9 , имеющий возможность осевого перемещения , установлен опорный подшипник 8 , кроме того , на ведущем валу 9 со сдвигом в осевом направлении последовательно закреплены шнек 14 и квадрат 15 внешняя поверхность шнека 14 соединена с охватывающей его втулкой 7 , внешняя поверхность которой , в свою очередь , жестко соединена с водилом 13 жестко связанным с маховиком 5 , а внешняя 50 поверхность квадрата 15 охвачена дополнительной втулкой 6 , к которой прикреплен центрирующий диск 12 взаимодействующий с внутренней поверхностью корпуса 1 через подшипники , при этом втулка 6 и дополнительная втулка 7 имеют возможность автономного вращения во взаимно противоположном направлении ; внутри маховика 5 , эксцентрично последнем , установлено зубчатое колесо 4 с внутренними зубьями , задето с шестерней 3 , жестко прикрепленной к расточки корпуса 1 55 в виде обечайки 10 связанной с маховиком 5 с помощью кронштейна 11 , один конец которого связан с помощью подшипников с наружной поверхностью обечайки 10 ведомого вала 2 , а второй конец которого свободно пропущен через маховик 5 , внутри обечайки 10 размещено ведомый вал 2 , выполненный коленчатым , выходной конец которого связан с ней через подшипники , а противоположный конец , в виде колена , жестко прикрепленный к упомянутой дополнительной втулки 6 , 60
UA 83284 U
3
при этом ось вращения конца ведомого вала 2 в виде колена , связанного с внутренней частью зубчатого колеса 4 через подшипники , совпадает с осью вращения зубчатого колеса 4
Андрей Ермола решил закончить всякое обсуждение этого двигателя на своём блоге, поставив условие для показа его работы - $ 100 000. Для простых людей это нереально. Видимо, только богатые теперь могут греться в лучах Солнца. В своё время Бесслер отказался обнародовать тайну своего колеса. Теперь вот и Андрей Ермола пошёл по его стопам. Это его личное дело. Но нам надо обязательно разгадать его секрет. Поэтому сделаем еще одну попытку.
Так как вначале мне показалось, что целиком собрать в «Живой физике» модель редуктора Ермолы будет непросто, а, возможно, и невозможно, то вначале было решено собрать модель из двух шестерёнок, и посмотреть, как они ведут себя при воздействии на них двух параллельных сил, закреплённых по одной на каждой из шестерёнок (рис.1).
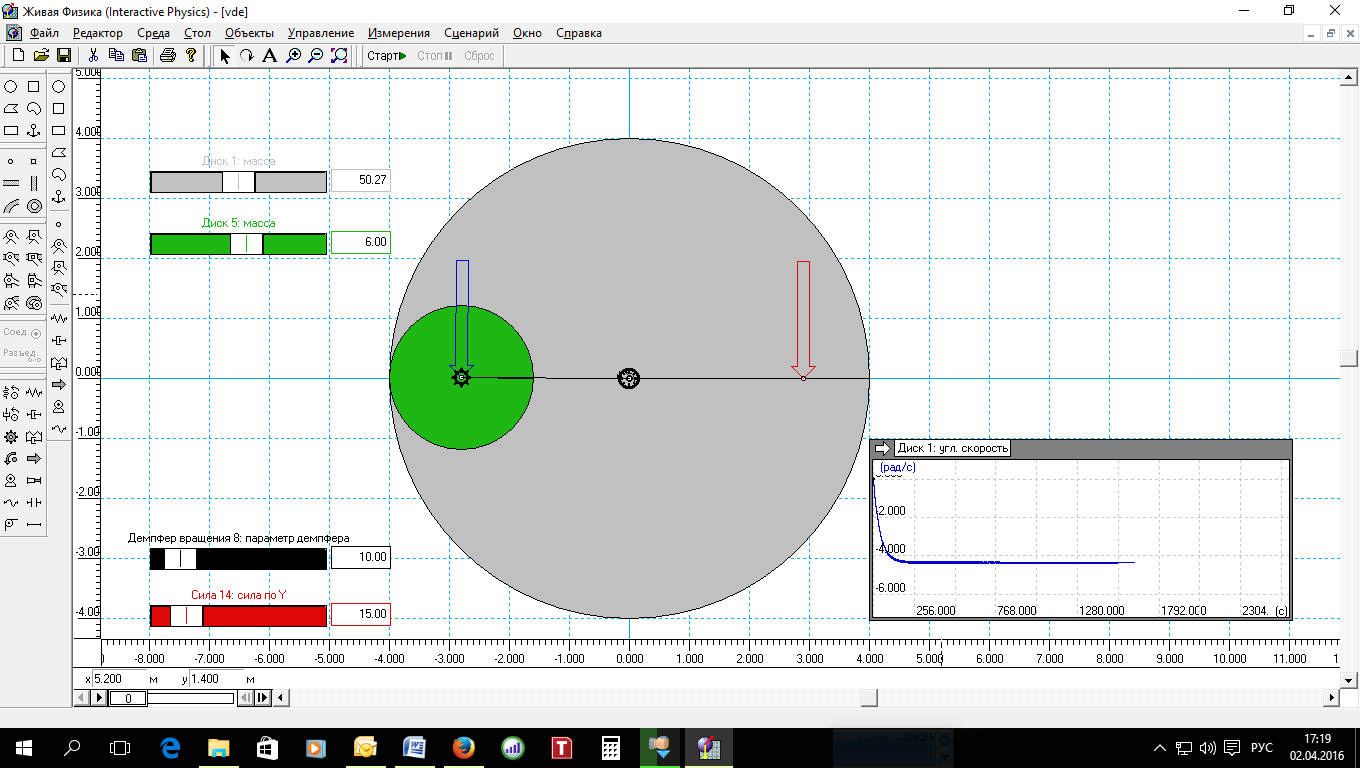
Рис.1. Грубая модель вечного двигателя Андрея Ермолы.
Двигатель Ермолы – редуктор, на который усилие подается через шнек. В данной модели шнек я не реализовал, но зато открыл один очень важный эффект, который проявляется именно у редуктора.
Итак, серый диск – это большая шестерня с внутренним зацепление. По её зубьям «катается» зеленый диск – малая шестерня с внешним зацеплением. На большую серую шестерню действует вертикально вниз красная сила, равная 15 н. На центр малой шестерни действует синяя сила, равная 15 н. Обе силы вначале параллельны друг другу. И их моменты равны друг другу. Поэтому, если бы эти две силы «давили» на большую шестерню, то шестерня бы не проворачивалась. Каждая сила связана со своей шестернёй так, что она поворачивается вместе с шестеренкой.
Правда, красную силу можно смещать вправо или влево, и тем самым менять их моменты. От соотношения моментов сил зависит итоговая предельная угловая скорость большой шестерни. Также в принципе можно величины красной и синей силы задавать разными. Принцип работы редуктора в ответ на пару сил это не нарушает.
В модели гравитация и электростатика отключена.
В этом редукторе важно, что малая шестерня может перемещаться по внутренним зубцам большой шестерни. Причем малая шестерня не совершает полный оборот внутри большой шестерни, а только делает поворот около 180 градусов, слегка отставая вначале от большой шестеренки, а затем её догоняет, но уже вращаясь в другую сторону. А так как обе силы заданы так, что они жестко связаны с шестернями, то, при колебательных движениях малой шестерни внутри большой, синяя сила совершает синусоидальные колебания. Совершает таким образом, что момент этой синей силы относительно оси большой шестерни то противостоит моменту красной силы, то складывается с ним, тем самым обеспечивая вращение большой шестерни. А вместе с большой шестеренкой вращается и малая шестерёнка. Это прекрасно видно на представленном видео [3].
Теперь остается добавить к такому редуктору шнек с квадратом. Но шнек должен работать по принципу обгонной муфты, как в юле. Один рычаг которого будет опираться на большую шестерню, а другой рычаг – на центр малой шестерни. И теперь при надавливании сверху на конец шнека пара сил будет прикладываться к большой и малой шестерням. При этом большая шестерня будет поворачиваться по часовой стрелке, а малая шестерня будет сдвигаться против часовой стрелке. Но при этом сила, приложенная к малой шестеренке, развернется примерно 180 градусов, и начнет помогать вращать большую шестеренку, увлекая при этом и малую. Но малая шестеренка, увлекаемая большой, поворачиваясь, меняет направление синей силы, что ведет к тому, что шнек будет повернут в «обратном» направлении и слегка поднят. Поэтому при следующем цикле все повторится сначала.
Именно малая шестерня обеспечивает создание в системе колебательного процесса. Эта шестеренка с приложенной к ней «вращающейся силой» играет роль задающего генератора, что позволяет организовать параметрический резонанс. И тем самым заставить постоянно действующую силу (мешок картошки) помогать вечному двигателю Ермолы преобразовывать потенциальную энергию вертикальной силы в кинетическую энергию вращения редуктора, а точнее большой шестеренки.
Остается добавить либо кардан к малой шестеренке, либо ось - к большой. И снимать энергию в нагрузку. Чтобы имитировать нагрузку вместо простой оси на большой шестеренке установлен демпфер вращения. Его показатели задаются черным регулятором слева от модели.
Справа от модели размещен индикатор, который показывает угловую скорость серого диска (большой шестерни). Если бы демпфера не было, то угловая скорость росла бы линейно до полного разрушения редуктора. А благодаря демпферу угловая скорость растет по логарифмическому закону и стабилизируется на уровне 5 рад/с.
В фильме [3] на последних кадрах малая шестерёнка начинает вращаться на все 360 градусов и колебательный процесс превращается в непрерывное вращение малой шестеренки внутри большой.
Такое поведение редуктора показывает, что если нам удастся силу, направленную вдоль вала редуктора преобразовать в две горизонтальные силы, одну из них опереть на большую шестеренку, а другую на центр малой, обеспечив при этом динамическое обнуление этой силы через механизм вращения или иной процесс, то можно получить вечное вращение редуктора в целом. Как это сделать, придется подумать инженерам.
Далее была собрана более сложная модель (рис.2)
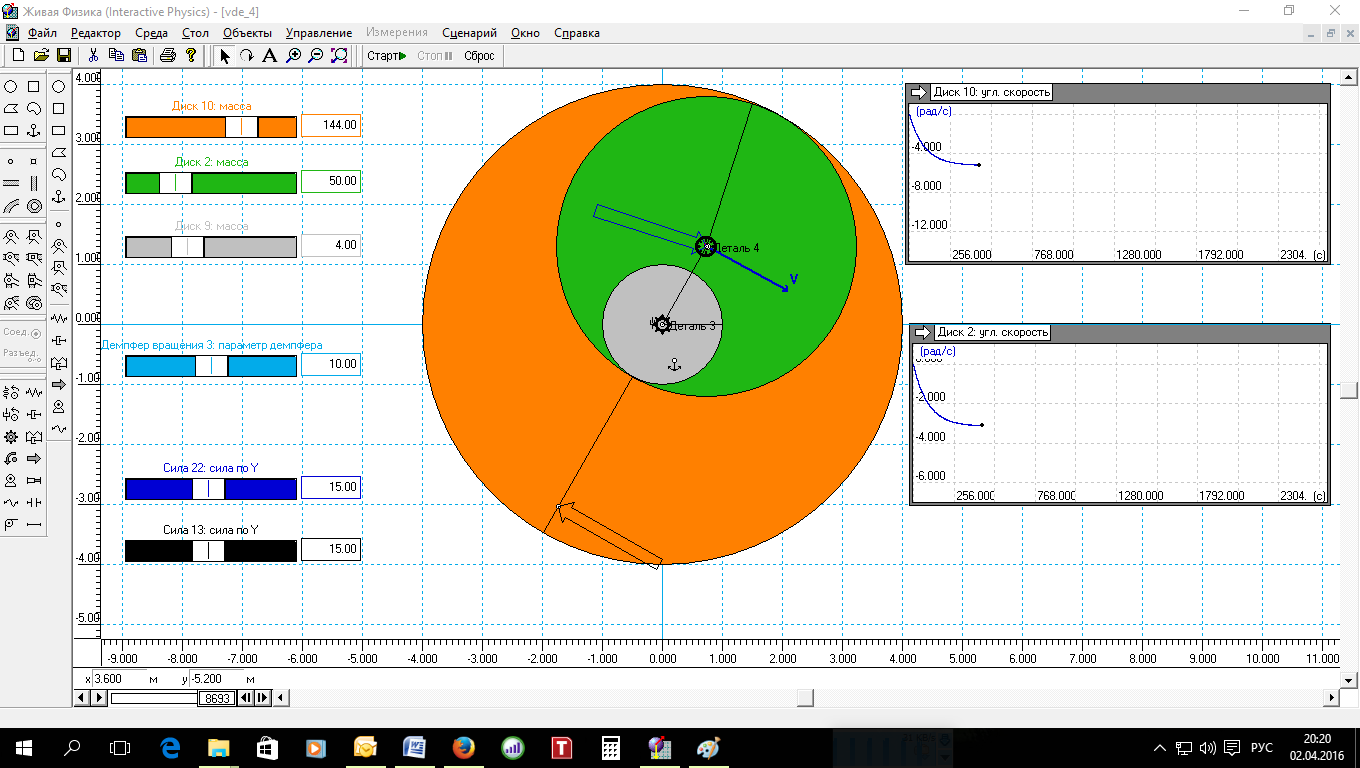
Рис.2. Кинематическая модель двигателя Ермолы, состоящая из трёх шестерёнок.
В этой модели [4] самая меньшая серая шестерня (номер 3 в патенте Ермолы) имеет внешнее зацепление. Она закреплена жестко на корпусе. Вокруг её вращается зеленая шестерня с внутренним зацеплением (номер 4). Ось зеленой шестерни закреплена на большой светло-коричневой шестерне (номер 5). На оси последней установлен демпфер вращения.
Слева от модели находятся 6 регуляторов, Верхние три регулятора позволяют задать массу каждой шестеренке, Цвета соответствующих регуляторов и шестеренок одинаковые.
Регулятор голубого цвета определяет параметр демпфера, что позволяет имитировать нагрузку.
Нижние регуляторы задают величину сил – чёрной и синей. В данном случае величина той и другой силы равна 15 н.
Справа от модели размещены два индикатора, на которых отражается угловая скорость коричневой и зеленной шестерни. Из-за наличия демпфера вращения угловая скорость четко ограничена и достигается за несколько десятков секунд.
На модели правая синяя сила показана пунктиром. Это означает, что она начинает действовать через определенное время после запуска модели. Это сделано для того, чтобы показать, что пока поднятый вначале (предполагается) в редукторе шнек опускается до квадрата, то синей силы нет. Но как только шнек достигает квадрата, то синяя сила появляется и уже редуктор вращается благодаря разности моментов черной и синей силы.
Как работает конструкция из двух шестерёнок и одного маховика показано в видео [5].
Правда тут возникают несколько моментов, которые следует обсудить. Если моменты будут одинаковые, то по идее редуктор не будет вращаться. И этот моделирование подтверждает.
Но тут мне вспоминается, что Ермола Андрей в своей книге «История открытия вечного двигателя» познакомил читателей с интересными историями своей жизни. Например, как он раскрутил маховик или гироскоп в двух плоскостях. И как этот гироскоп пошел крушить забор. Также он привел один фильм, где показано как ведет себя ось гироскопа, если один её конец свободен. То есть, ось вращающегося гироскопа стремится установиться параллельно оси вращения Земли.
Всё это заставило меня вспомнить об одном свойстве гироскопа, как потеря его веса при вращении. Вращающееся колесо или гироскоп можно закрепить вертикально на одном конце оси и оно будет вращаться. Правда, как только угловая скорость такого гироскопа уменьшится до некого предела, то он уже не сможет держаться на одном конце оси и, вначале нутирует с нарастанием амплитуды прецессии, а затем падает вниз. Если же вращающийся с большой угловой скоростью гироскоп немного надавить на свободный край оси, то начальная амплитуда нутации будет заметной, а затем она уменьшится практически до нуля. Примерно, как на рис.3.
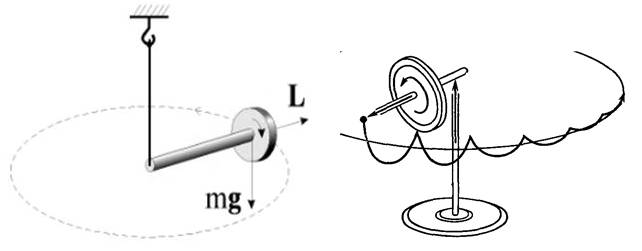
Рис.3. Вращающийся гироскоп теряет свой вес.
Этот опыт показывает, что гироскоп (вращающийся маховик) оказывает сопротивление давящей на него силе, а значит, в соответствие с законом Ньютона происходит «обнуление» силы, давящей на ось гироскопа. То есть, гироскоп отлично держит удар, как будто это не маленький волчок, а массивное неподвижное тело. Вращающийся гироскоп «заматывает» силу, которая воздействует на него, и не передает её на другие тела.
Обращаю на это внимание читателя потому, что во вращающемся редукторе Ермолы шестерня 4 вращается с достаточно высокой угловой скоростью, что превращает её в гироскоп. На ось этого гироскопа в точке А воздействует сила от рычага, который прикреплён к втулке квадрата. И когда эта сила давит на вращающуюся шестерню 4, то шестерня 4 не передает это воздействие на маховик 5 в силу тех закономерностей, которые показаны на рис.3.
А это, похоже, означает, что из-за обнуления силы, которая прикладывается к оси детали 4 в точке А, на маховик 5 действует только сила в точке В. А раз так, то получаем положительный момент для маховика 5 и все условия для его вращения. Деталь 5 соответственно будет вращать колено кардана (точка А), а колено кардана будет передавать вращение на выходной вал редуктора с угловой скоростью, равной угловой скорости вращения маховика 5.
В верности этой идеи я пока сомневаюсь, в данном случае у меня пока другой идеи нет. Но вспоминая написанное в книге Ермолы о поведении маховика, раскрученного вокруг двух осей, похоже, другого внятного объяснения предложить нельзя. Возможно, потребуется привлечение к решению этой проблемы профессиональных математиков и физиков (механиков), которых, как заметил однажды А.Ермола, этому в институте пока не учат.
Получается, что для того, чтобы вечный двигатель Ермолы начал работать (вращаться), его надо раскрутить до определенной частоты вращения, при которой начнутся проявляться гироскопические свойства детали 4. Дальше уже редуктор будет вращаться сам.
Именно для этого введен в конструкцию шнек. Он, опускаясь по спирали в течение первых нескольких секунд, раскручивает редуктор, далее шнек упирается в квадрат, и застревает в нём своим нижним квадратным концом. Из-за чего возникают две горизонтальные силы. Одна сила на конце водила, которое упирается в деталь 5, а вторая сила в центре маховика 4. Моменты сил равны. Поэтому, если деталь 4 не вращалась бы, то и дальнейшего раскручивания редуктора бы не было. Но в момент появления силы в точке А деталь 4 уже вращается с достаточной угловой скоростью, и эта сила, давя на ось детали 4, обнуляется ответной реакцией этого гироскопа. И после этого силе в точке В не составляет никакого труда начать раскручивать редуктор до максимально возможной угловой скорости.
Так как в самой модели, скорее всего, вследствие её несовершенства обнуления синей силы не происходило. Поэтому обнуление этой силы я оформил в виде вращения этой силы вместе с шестеренкой 4, что дает то же обнуление, но не статическое а динамическое.
Если быть чуток точнее, то в двигателе Ермолы происходит не обнуление силы, действуюшей на ость маховика 4 в точке А, а перенаправление её в пространстве на 90 градусов. В результате сила уже действовала не перепендикулярно к радиусу маховиков 4 и 5, а вдоль радиуса. Итог - нулевой момент относительно главной оси вращения. А у парной силы момент относительно оси вращения оставался положительным, что приводило к нарушению классического закона Ньютона.
Такие вот соображения по отношению к редуктору Ермолы (его вечному двигателю) у меня возникли после проведения пусть и поверхностного моделирования отдельных элементов его редуктора в программе «Живая физика».
Ссылки:
03.04.2016.