По мере освоения программы «Живая физика» возникают идеи подвергнуть моделированию все известные на сегодняшний день успешные конструкции. Например, двигатель Дмитриева. Пока мне не удалось собрать это колесо.
Но один элемент создать удалось. Обгонная муфта моделировалась двумя стандартными объектами программа «Живая физика» - осью и заклепкой. Ось была включена в режиме всегда, а вот заклепка «включалась» только тогда, когда элемент с грузом «застывал» во вращении или начинал вращаться, например, по часовой стрелке, а когда элемент вращался против часовой стрелки, то заклепка становилась неактивной.
Но тут оказалось, что все свойства всех объектов настраивались на основную систему координат, поэтому вращение любого объекта определяется по центру координат. А мне надо было считывать вращение объекта вокруг своей оси. Эта проблема до конца мной еще не решена, но для одного элемента сделать это, похоже, удалось.
Попытка настроить таким же образом хотя бы второй элемент успехом не увенчалась, так как после запуска модели начинали проявляться эффекты, которых изначально быть не должно. Например, начинали выводиться силы, которые в модель заложены не были.
Пришлось проводить опыт с одним элементом, а второй, но без обгонной муфты, использовать в качестве противовеса. Результат меня, скажу честно, не обрадовал. Вначале, вроде бы, всё шло, как и ожидалось.
Колесо с демпфером на оси предварительно раскручивалось силой, затем сила отключалась, и колесо дальше крутилось само. Но после сотни оборотов колесо останавливалось, а затем переходило в режим затухающих колебаний.
Так что, не исключено, что двигатель Дмитриев тоже нуждается в параметрическом возбуждении. Например, если элементы будут магнитами, то под самой нижней точкой колеса надо поставить электромагнит, который бы включался с частотой вращения колеса, умноженной на число элементов на колесе. Создаваемое этим электромагнитом магнитное поле отбрасывало бы магнитные грузы колеса слегка вверх, а там бы их фиксировала защелка. А наверху (в верхней точке колеса) уже сила тяжести освобождала грузы из защёлки, и далее грузы бы двигались по инерции, ограниченные во вращении обгонной муфтой. Так что эксперименты с колесом Дмитриева еще впереди. А пока проведено моделирование более простой конструкции – электродвигателя Минато.
Сам по себе электродвигатель Минато, несмотря на туман и легенды, которые были созданы самим автором, да и теми, кто пытался разгадать секреты этой простой конструкции, является электромотором с импульсным возбуждением. По сути, двигатель Минато, это очень умный ротор, который в нужное время и в нужном месте выдает задание статору сгенерировать магнитный импульс, который «подкормит» ротор и тем самым обеспечит стабильную частоту вращения.
Для этого в двигателе Минато есть всё необходимое. Ротор, на половине которого установлены магниты, одноименные полюса которых направлены к наружной поверхности ротора. Статор – электромагнит, который включается строго по «приказу» геркона или датчика иной конструкции. Аккумулятор, геркон и система управления по передаче энергии аккумулятора на статорный электромагнит.
Чтобы энергия зря не пропадала в моторе два статорных электромагнита, точнее один подковообразный магнит, у которого задействованы в работе два полюса, два ротора, магниты которых установлены одноименными полюсами к одноименным полюсам «своего» статора».
На одном из роторов установлен геркон 30, замыкание контактов которого вызывает подачу напряжения с аккумулятора на электромагниты и, соответственно, формирование импульса магнитного поля, который «шлепком» подталкивает подошедший на должное расстояние магнит ротора.
Рис.1. Сборка рисунков из патента Минато.
На рис. Фиг.3 указано, что на роторе 8 магнитов, поставленных ёлочкой. Но возможно, этих магнитов на роторе как больше, так и меньше. Пока мне не ясно, как один геркон способен сгенерировать сразу серию импульсов, хотя это может произойти за счет дребезга контактов, когда после первого контакта они пружинят и отходят друг от друга. А затем следует повторный контакт, за ним еще, и так до 6-8 контактов. Пока окончательно контакты не замкнуться или разомкнуться. А в итоге 6-8 замыканий контактов геркона вызовут 6-8 импульсов на электромагнитах, что и обеспечит серию «шлепков» по всем магнитам на роторе.
Выскажу предположение, что, чтобы наверняка обеспечить запуск электродвигателя, при предыдущей остановке двигателя, геркон, а значит и ротор в целом, должны занять позицию, которая обеспечит срабатывание геркона при включении двигателя.
Тут важно, чтобы под статорным магнитом оказался хотя бы один из магнитов ротора и ротор совершил хотя бы один оборот.
Далее уже начнет работать параметрический механизм, что позволит ротору через некоторый промежуток времени достигнуть необходимой угловой скорости (частоты вращения), которая будет определяться суммарной нагрузкой на вал – сама нагрузка плюс демпферное сопротивление.
Всех удивляет высокие характеристики мотора Минато. Это связано, во-первых, с тем, что малый ток с аккумулятора за счет правильной намотки обмоток электромагнитов создает мощный импульс магнитного поля. Избыток энергии, мне кажется, возвращается опять в батарею или аккумулятор.
Во-вторых, энергия аккумулятора (батареи) расходуется экономно и импульсами. А это означает, что в аккумуляторе или батарее при работе не возникает поляризация, а сами импульсы тока постоянно как бы омолаживают электролит батареи (аккумулятора).
Поэтому батареи при импульсном отборе у них энергии служат дольше, чем включенные в нагрузку постоянно, а тем более с большим током.
При замере тока и напряжения многие приборы не способны работать в импульсном режиме, а те, которые способны это делать, функциональны только в узком диапазоне частот.
Поэтому инерция, которая, так или иначе, присутствует в таких приборах, не может показать истинные результаты.
Вот и создается впечатление, что мотор Минато работает в сверхъединичном режиме. Но в любом случае КПД таких моторов, похоже, не менее 99%.
Мотор Минато, получается, специально предназначен для питания от батарей и аккумуляторов. При питании от сети экономии энергии может уже не быть. Или надо будет специально между сетью и мотором поставить небольшой аккумулятор или конденсатор, чтобы мотор питался от аккумулятора (конденсатора), а сеть подпитывала аккумулятор (конденсатор) по мере его разряда.
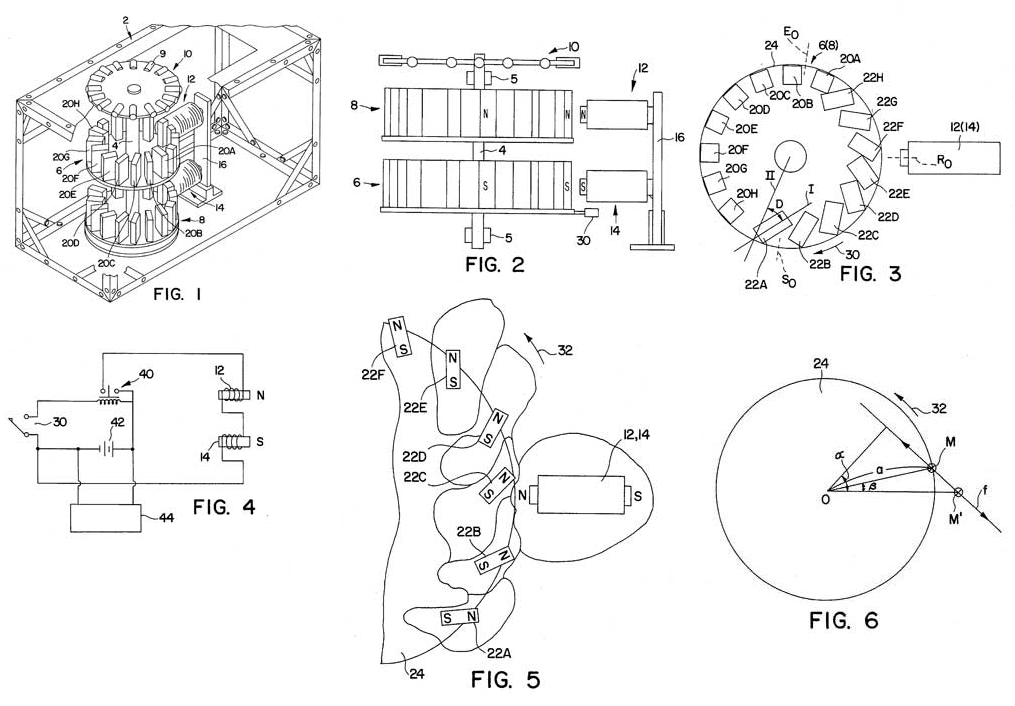
Для исследования механизма работы двигателя Минато была собрана простая модель (рис.2.)
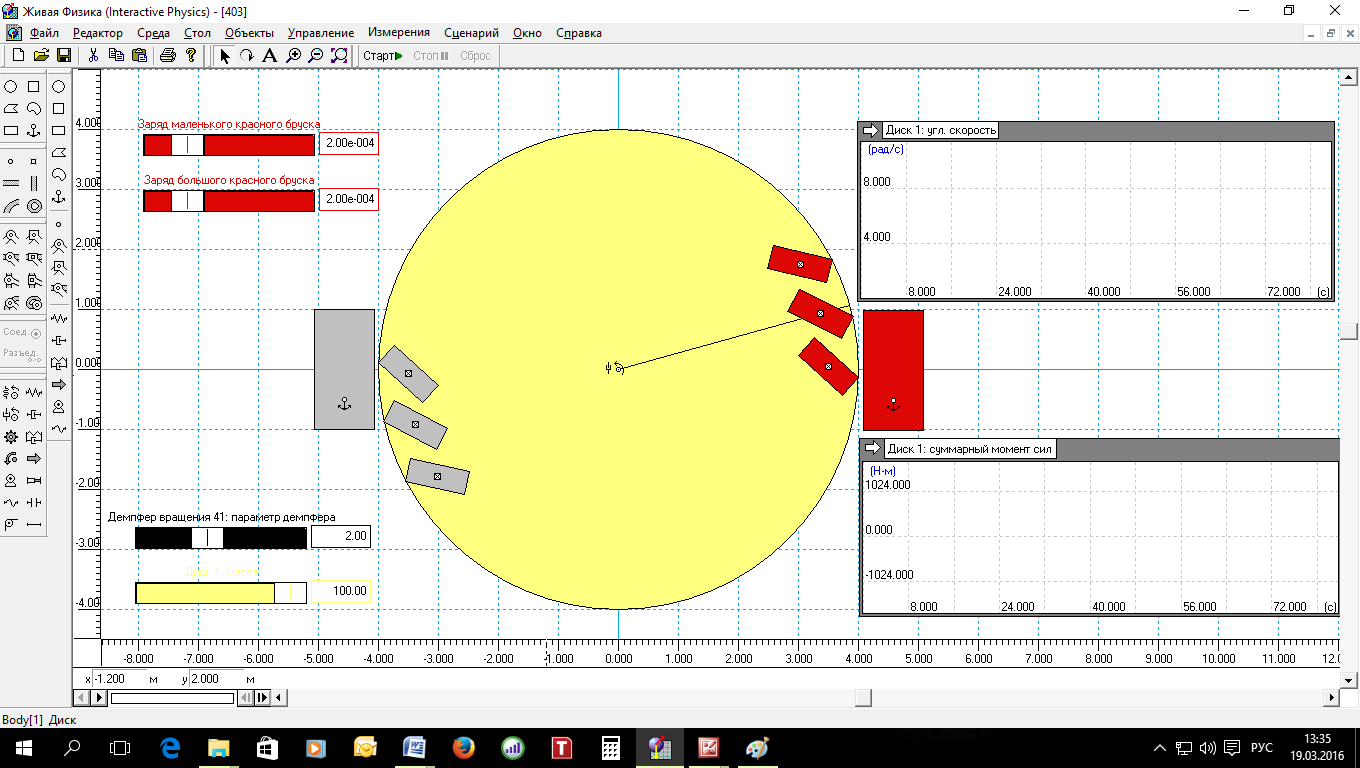
Рис.2. Модель двигателя Минато.
На этой модели в центре ротор жёлтого цвета. На нём закреплены 3 магнита красного цвета и три болванки серого цвета, которые нужны для уравновешивания ротора. Справа от ротора красный прямоугольник – это статор, который создает импульсы южной полярности. Поэтому на роторе магниты повернуты к статору тоже южными полюсами.
Слева от ротора закреплен якорем прямоугольник серого цвета, который легко при необходимости превратить во второй электромагнит с северной полярностью. А серые противовесы на роторе - в магниты с северным полюсом, направленными к края ротора. Но в этом эксперименте заряды у всех серых элементов обнулены. Снят заряд и у желтого диска (ротора).
При прохождении красных магнитов мимо красного магнита статора в последнем генерируется магнитный импульс, который отталкивает от себя магниты ротора, заставляя ротор поворачиваться или передавая импульс на ротор, увеличивая момент, действующий на ротор.
На рис.2. это отражено. В начале эксперимента ротор повернут так, чтобы возник первый импульс. Для этого в поле заряд красного прямоугольника введена формула:
if(and(body[13].p.x>=0,body[13].p.y>=0)=1,input[17],0) (1)
Body[13].p.x и Body[13].p.y – это координаты самого нижнего красного магнита на роторе, при прохождении которого мимо красного статорного элемента в последнем возникает импульс тока. А input[17] – это величина заряда, который создается в статорном красном прямоугольнике, пока центр нижнего красного магнита ротора (Body[13]) находится в первом квадранте, где координаты X и Y больше или равны нулю.
Запрограммировать серию из трех импульсов, конечно, можно, но я это не стал делать, чтобы не усложнять первоначальной задачи – показать, как работает двигатель Минато. Конечно, можно было, используя диполи из зарядов, смоделировать «настоящие» магниты, но для первого раза прекрасно сойдет использование электростатики в её простом варианте.
Слева от двигателя располагаются регуляторы, с помощью которых можно задавать заряды на элементах статора и ротора, а также параметры демпфера и массу ротора.
Справа от модели размещены два индикатора. На верхнем отражается угловая скорость ротора, а на нижнем – суммарный момент сил, действующих на ротор (жёлтый диск).
При желании модель можно оснастить как дополнительными регуляторами, так и дополнительными индикаторами, в том числе и такими, которые будут отражать мгновенную мощность на оси ротора, или иные параметры.
Теперь пора показать начальные результаты моделирования двигателя Минато (рис.3.).
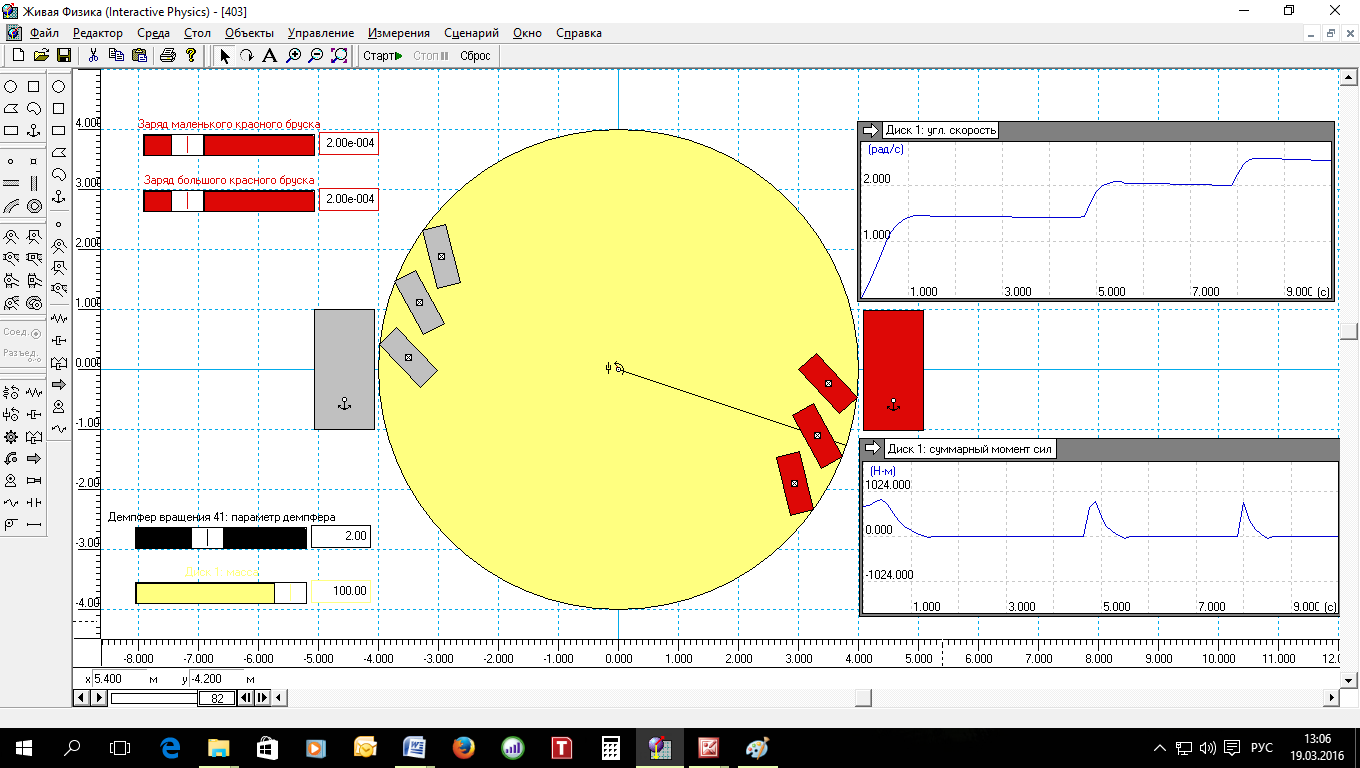
Рис.3. Первые 10 секунд эксперимента с моделью двигателя Минато.
На этом рисунке показаны первые 10 секунд эксперимента.
На индикаторах справа от модели прекрасно видно, что первый импульс задает наибольший вклад в угловую скорость. Добавка от каждого последующего импульса уменьшается. На нижнем индикаторе видно, как ведет себя суммарный момент сил, действующий на ротор (жёлтый диск). Видно, как уменьшается интервал между импульсами (нарастает частота вращения), и что демпфер вносит свой вклад в суммарный момент сил – у каждого импульса есть в конце отрицательный зубчик. Форма импульсов напоминает те, которые возникают в автоколебательных системах – по логарифму возрастает, и по логарифму спадает.
На рис.4. показан результат моделирования уже через большой промежуток времени, когда частота вращения ротора уже стабильно держится на одном уровне.
Но все равно хорошо просматривается колебательный процесс, который создается из-за того, что электромагнит статора воздействует на магниты ротора всего раз за период. Это можно считать небольшим недостатком мотора Минато. Хотя это может быть просто недостатком данной модели, а у Минато вал ротора вращается более равномерно.
Возможно, при наличии серии импульсов, по каждому импульсу на один магнит ротора, кривая на индикаторе была бы более гладкой. Этот результат сразу подсказывает, что вместо одной группы магнитов статора надо создать три, но при этом надо разместить вокруг ротора три статорных магнита. А вот управлять всем этим хозяйством можно с помощью одного геркона, который создавая серию замыканий и размыканий, будет заставлять электромагниты формировать серии всплеском магнитного поля, которые будут подгонять сразу от 20 до 30 магнитов ротора. И таким образом в итоге получим практически равномерное вращения.
Рис.4. Результат моделирования мотора Минато на 80 секунде.
В этом случае мы приходим к тем вариантам электромоторов, которые были рассмотрены в одной моей предыдущей статье. Только в данном случае, вместо гармонического возбуждения будет использоваться импульсный вариант, который при прочих равных условиях увеличивает угловую скорость вала на 25%.
Как было показано выше, импульсный режим управления мотором лучше всего подходит для моторов, питающихся от химических батарей и аккумуляторов.
Прекрасно видно, как возрастает частота импульсов. Возрастает потому, что возрастает угловая скорость вращения ротора. То есть ротор сам определяет свою частоту вращения, и управляет импульсами, которые исходят от статорного электромагнита.
Теперь остаётся усовершенствовать модель, превратив серый прямоугольник слева от ротора в полноценный электромагнит, а серые прямоугольники в полноценные магниты северной полярности, что позволит с одной стороны смоделировать второй ротор в патенте Минато, а у данной модели – просто добавить второй электромагнит.
Но можно окружить ротор 4-мя электромагнитами через каждые 90 градусов и запрограммировать каждый из них включаться при прохождении мимо них красных магнитов ротора. Причем для этого можно будет использовать всё тот же геркон, который вращается вместе с ротором. Такое усовершенствование позволит создать моторы с практически идеальным вращением.
А можно окружить ротор через каждые 90 градусов электромагнитами, а магниты на ротор установить по всему периметру ротора. И тогда одним герконом можно будет включать все электромагниты, которые будут подгонять ротор сразу из 4-х позиций.
Решение же о выборе конструкции усовершенствованного двигателя Минато можно будет принимать уже на основании анализа с привлечением новых экспериментов, а также технологичности или экономичности тех или иных решений.
Выводы:
Ссылки:
19.03.2016.