Проведенное моделирование в программе «Живая физика» показало, что электродвигатели можно запитывать не только от трех фаз, но можно подавать напряжение на все статорные электромагниты одновременно с одной фазы, но частота такого тока должна определяться частотой вращения ротора. Частота эта должна быть равна частоте вращения ротора, умноженная на число статорных электромагнитов.
Это значит, что любой мотор при питании его от трех фаз можно сделать в виде сборки из трех одинаковых блоков, состоящих из статора и ротора. В этом случае останется только заранее обеспечить поворот соседних роторов на 120 градусов.
В данной статье покажем, как ведет себя двигатель с 4-мя статорными электромагнитами. Вначале посмотрим, как будет вести себя двигатель с одним магнитом в статоре, затем последовательно соберем ротор с 2, 3 и 4-мя магнитами ротора. И, наконец, посмотрим, как можно увеличить мощность такого двигателя в два раза установкой еще 4-х магнитов, но уже противоположной полярности.
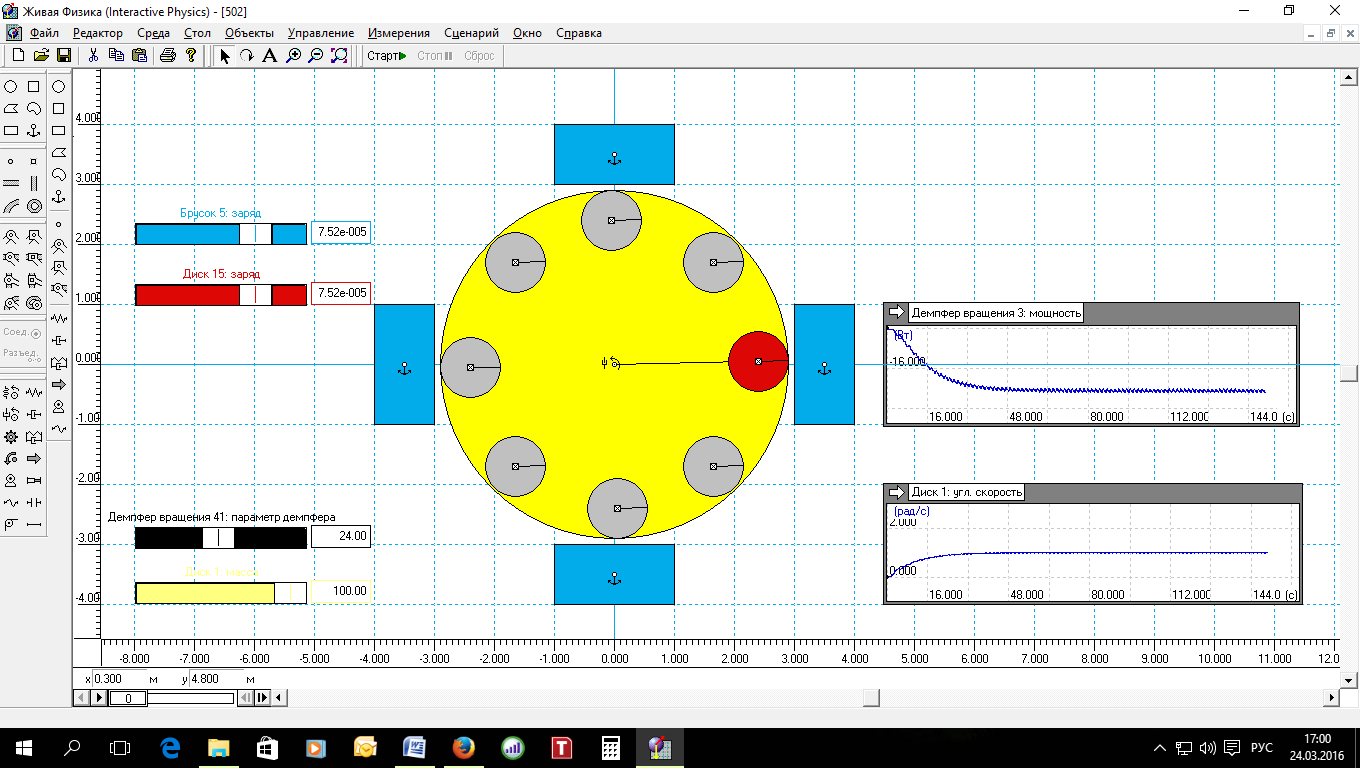
Рассмотрим первый двигатель (рис.1)
Рис.1. Моделирование электромотора с четырьмя статорами и одним ротором.
На рис.1 в моторе 4 голубых прямоугольника – это статоры. Напряжение, а точнее заряды, на них изменяется по формуле:
Input[31]*sign(sin(4*(body[1].p.r%(2*pi())))) (1)
где Input[31] – это данные, снимаемые с самого верхнего регулятора слева от модели мотора, цвет регулятора голубой. В данном случае этот показатель равен 7.52e-5к.
В самой формуле происходит получение остатка от деления угла поворота ротора на 360 градусов. То есть берется модуль от угла поворота модуля в радианах, делённого на 2*пи (пи – 3.14159…). Этим достигается тот самый параметрический резонанс, который нужен для нормальной работы любой колебательной системы – ротор управляет частотой смены полярности статорных элементов, тем самым обеспечивая получение нужной порции энергии от статоров в нужном месте и в нужные моменты времени.
Желтый диск – это ротор, его масса определяется самым нижним регулятором жёлтого цвета справа от модели. В данном случае масса ротора равна 100 кг.
На роторе размещены 8 дисков. ? из них, окрашенные в серый цвет, это болванки, размещенные для центровки ротора. Заряд их равен нулю. А красный диск имеет заряд, который определяется регулятором красного цвета. В данном случае этот заряд равен 7.52e-5к.
Справа от модели мотора имеется два индикатора. На верхнем индикаторе фиксируется мощность, рассеиваемая на демпфере вращения, который установлен на оси ротора. Регулятор этого демпфера окрашен черным цветом. Он показывает 24 ед. Максимальная мощность на индикаторе примерно равна 24 вт. А на нижнем индикаторе отражается угловая скорость ротора (жёлтого диска). При одном роторном магните угловая максимальная скорость ротора примерно равна 1 рад/с.
Теперь пусть на роторе будет 2 элемента положительной полярности (рис.2).
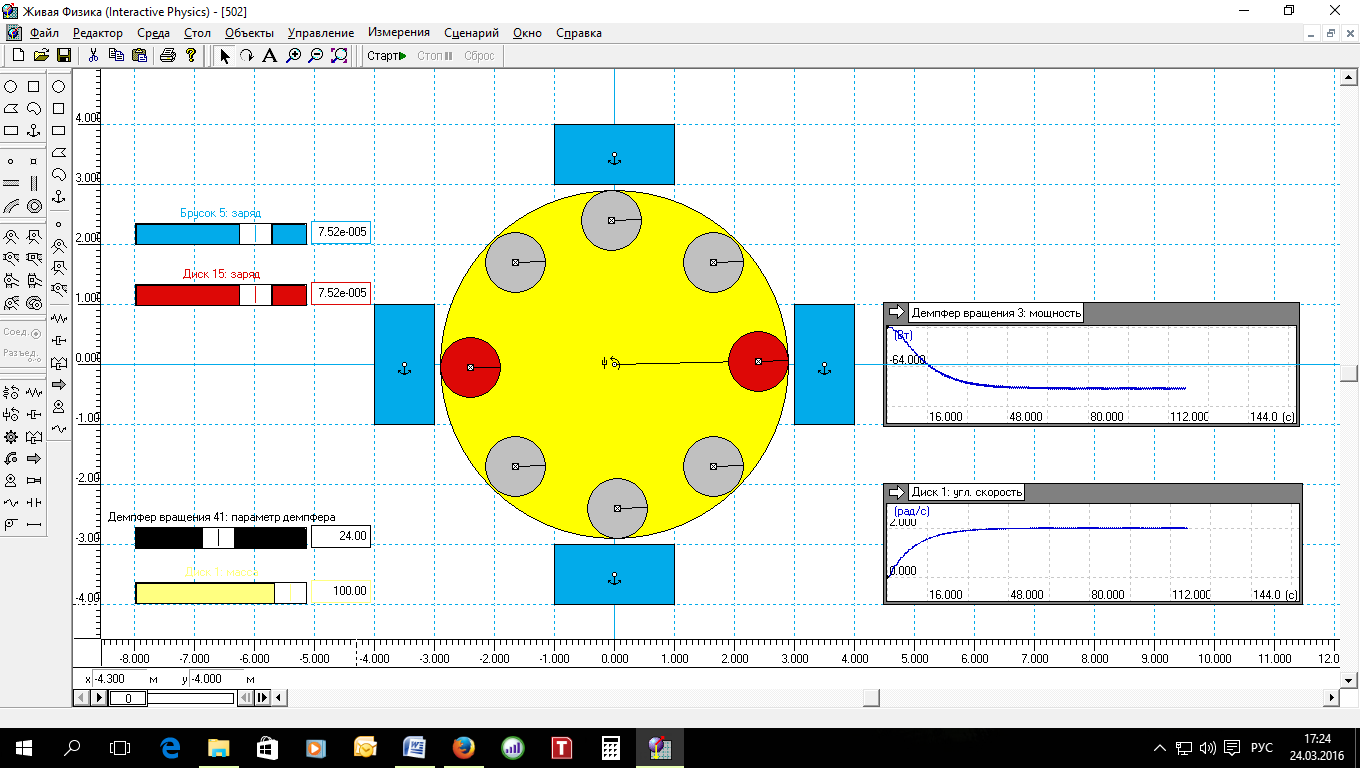
Рис.2. Мотор с 4-мя электромагнитами на статоре и двумя магнитами на роторе.
Теперь у нас уже два магнита на роторе, один напротив другого. Каждый статор работает по формуле (1). И именно числом статоров определяется необходимая частота параметрического возбуждения ротора. То есть частота смены полярности статорных магнитов в 4 раза выше частоты вращения ротора.
На эту особенность мотора, как параметрической системы, следует обратить внимание особо. У меня есть подозрение, что именно такой принцип возбуждения электромотора своего электромобиля использовал Тесла, когда гонял на нём целую неделю, не используя ни капли бензина.
Как известно, на его электромобиле стоял стандартный трехфазный электромотор переменного тока. Кроме того, Тесла изготовил из 12 ламп, а также неизвестного количества конденсаторов и катушек некий прибор, который подключил к панели управления автомобилем. Когда этот прибор был подключен к управлению автомобилем, то Тесла на нём ездил с большой скоростью. Но когда Тесла посчитал себя оскорблённым журналистами и настырной публикой, то он просто отключил этот прибор и унёс с собой, оставив людей до сих пор гадать над тайной его автомобиля.
Поэтому выскажу мысль, что в коробочке Тесла собрал генератора на частоту, которая была выше в три раза больше, чем частота вращения вала. Но это верно в том случае, если число статорных электромагнитов равно трём. Если же в моторе его автомобиля стоял электромотор с шестью статорными электромагнитами, то частота задающего генератора, который собрал Тесла, была равна шестикратной стандартной частоте вращения вала мотора.
В любом случае в коробочке Тесла был генератор, который мог генерировать гармонические или прямоугольные импульсы с частотой до 400 гц. А во время езды на автомобиле Тесла управляя частотой этого генератора, заставлял вращаться вал мотора с нужной частотой, тем самым задавая автомобилю нужную скорость.
А чтобы заставить ротор мотора вращаться с частотой 60 гц, надо было подавать на все обмотки статорных магнитов пульсирующий (переменный ток) с частотой в 180 (360) гц.
Откуда брался это ток? На автомобиле, который Тесла на время превратил в электромобиль, оставались все блоки, которые были на этом автомобиле, пока там не заменили ДВС на электромотор. Значит там остались магнето и аккумулятор. Скорее всего, его коробочка как раз и управляла этими оставшимися в автомобиле блоками, заставляя их подавать ток в катушки электромагнитов статора, которые, как я предполагаю, были включены не треугольником или звездой, а параллельно.
Не исключено, что я ошибаюсь. Но именно эти мысли появились у меня при наблюдении за поведением модели электромотора. Тесла был гением параметрического резонанса, прекрасно знал, как его можно вызвать и поддерживать. Он знал, как можно расколоть Землю. Но также он знал, как можно вытянуть лишний миллион долларов из неграмотных и наивных богачей типа Моргана.
Дальше можно показать, как ведет себя модель при трёх роторных положительных магнитах, а затем довести число роторных магнитов до четырёх. Это, конечно, интересно, но не будем томить читателя. И поэтому сразу на роторе «установим» 4 положительных магнита (точнее положительных заряда).
На рис.3. показан результат эксперимента
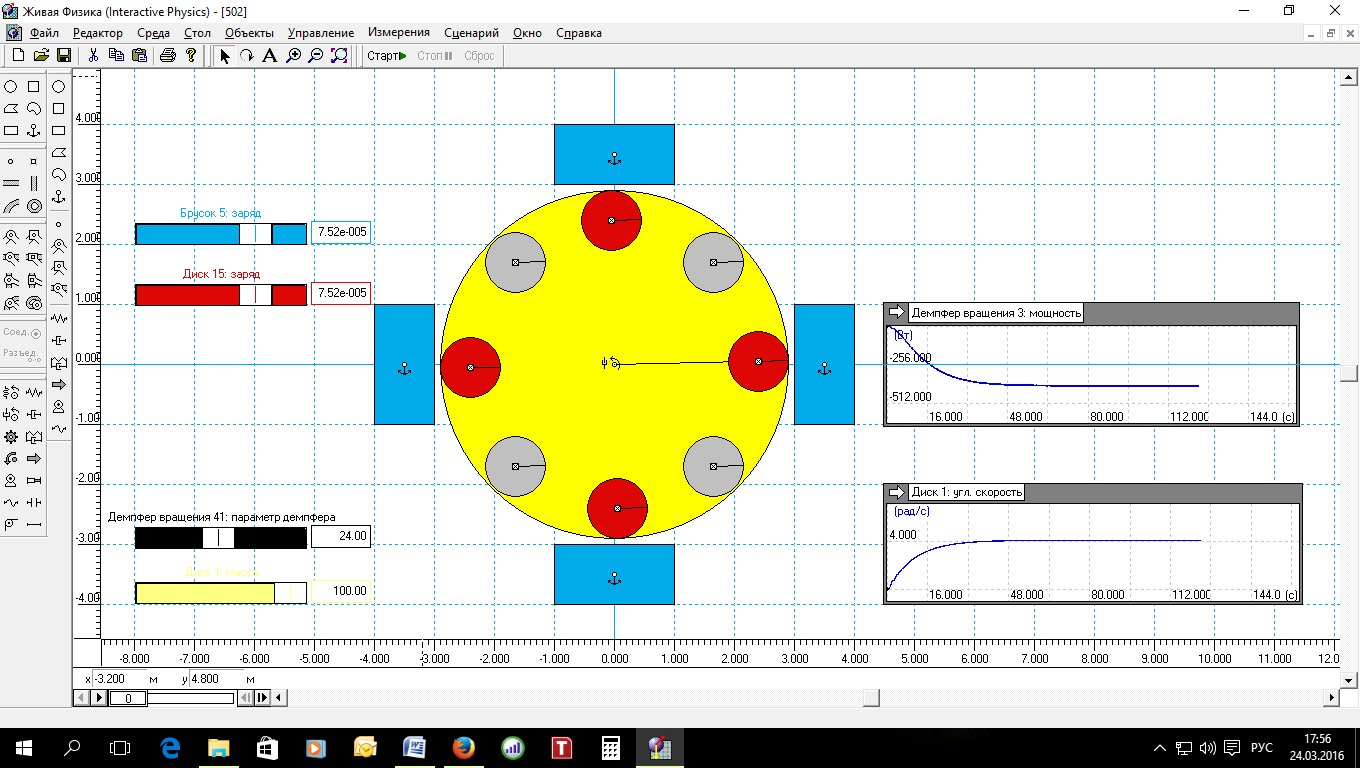
Рис.3. Мотор с 4-мя электромагнитами на статоре и четырьмя магнитами на роторе.
Кроме числа магнитов на роторе, эта модель ничем не отличается от предыдущей. 4 серых диска на роторе пока выполняют роль балансиров. И предназначены для дальнейшего совершенствования мотора.
По индикаторам можно сразу отметить, что мощность, рассеиваемая на демпфере вращения, увеличилась, и стала равной 384 вт. А угловая частота ротора уже равна 4 рад/с, то есть удвоилась по сравнению с предыдущим опытом.
Во первых трех опытах электромагниты на статоре создавали стоячую магнитных волну, гребни которого заставляли роторные магниты перемещаться против часовой стрелки, увлекая за собой массивный ротор (жёлтый диск). И это все можно рассматривать как процесс, состоящий из двух фаз. В первой фазе электромагнит статора отталкивает от себя ближайший (против часовой стрелки) магнит ротора, а через полупериода, поменяв полярность, начинал притягивать к себе ближайший (по часовой стрелке) соседний магнит ротора. Далее с каждым периодом процесс повторяется. А так как частоту колебаний статорных электромагнитов задаёт сам ротор, то к началу каждого периода волны у статора оказывается очередной магнит ротора. За 4 волны у статоров ротор поворачивается ровно на один оборот.
Теперь усовершенствуем наш мотор таким образом, чтобы каждый электромагнит статора мог управлять сразу двумя магнитами ротора. Для этого надо задать полярность магнитам ротора так, чтобы электромагнит статора один магнит ротора отталкивал, а соседний за ним – притягивал. А это возможно только в том случае, если на роторе магниты с положительными (южными) полюсами будут чередоваться с магнитами с отрицательными (северными) полюсами.
Поэтому все 4 серых диска на модели превратим в 4 магнита с отрицательной (северной) полярностью. Для этого закрасим из в синий цвет, а в поле заряд введем отрицательное значение. И если в красных дисках заряд равен Input[30], то в синих дисках заряд будет равен - Input[30].
На рис.4. показан результат моделирования этого усовершенствованного мотора
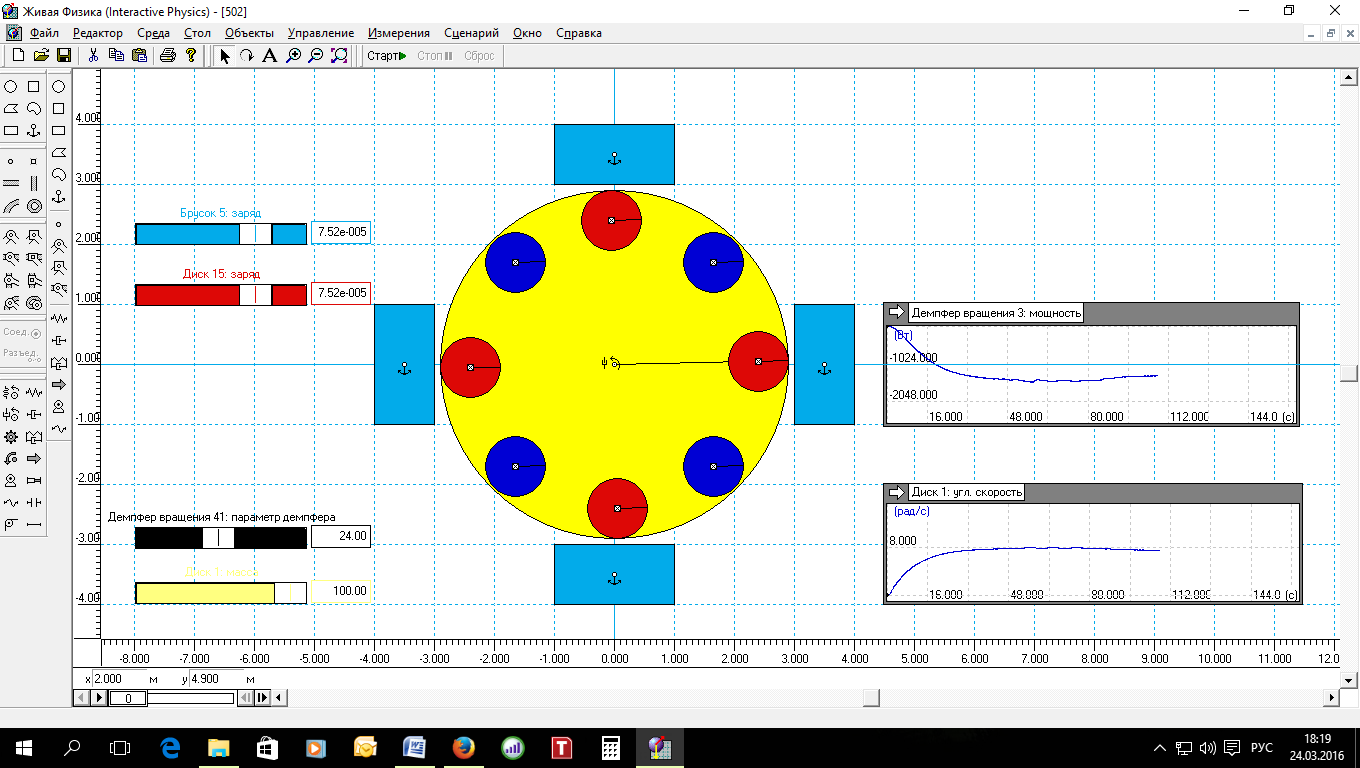
Рис.4. Мотор с 4-мя электромагнитами на статоре и 8-ю магнитами на роторе.
Результат налицо. Мощность, рассеиваемая на демпфере вращения увеличилась в 4 раза, до 1500 вт, а угловая скорость ротора возросла в 2 раза – до 4 рад/с. Угловая скорость в 8 рад/с является критической для данного мотора, так как видно, что кривая на верхнем индикаторе начинает терять гладкость, чего по идее быть не должно.
Теперь на основании проведенного моделирования можно сделать несколько интересных выводов.
Выводы:
24.03.2016.