Петров А.М в своих статьях, доказывает, что при организации во вращающемся колесе колебаний подвижных грузиков вдоль радиуса (спиц) с частотой колебаний, равной частоте вращение колеса, возникают два эффекта. Во-первых, возникает безопорная сила, направленная перпендикулярно силе тяжести. Во-вторых, повышается мощность вращающегося колеса, что позволяет использовать такое колесо в качестве источника механической энергии. Используя уже наработанную модель, созданную в программе «Живая физика» было решено проверить справедливость этих положений теории Петрова А.М.
Для этого было решено проверить справедливость теории Петрова А.М., заставив пока «работать» вначале один подвижный груз (рис.1).
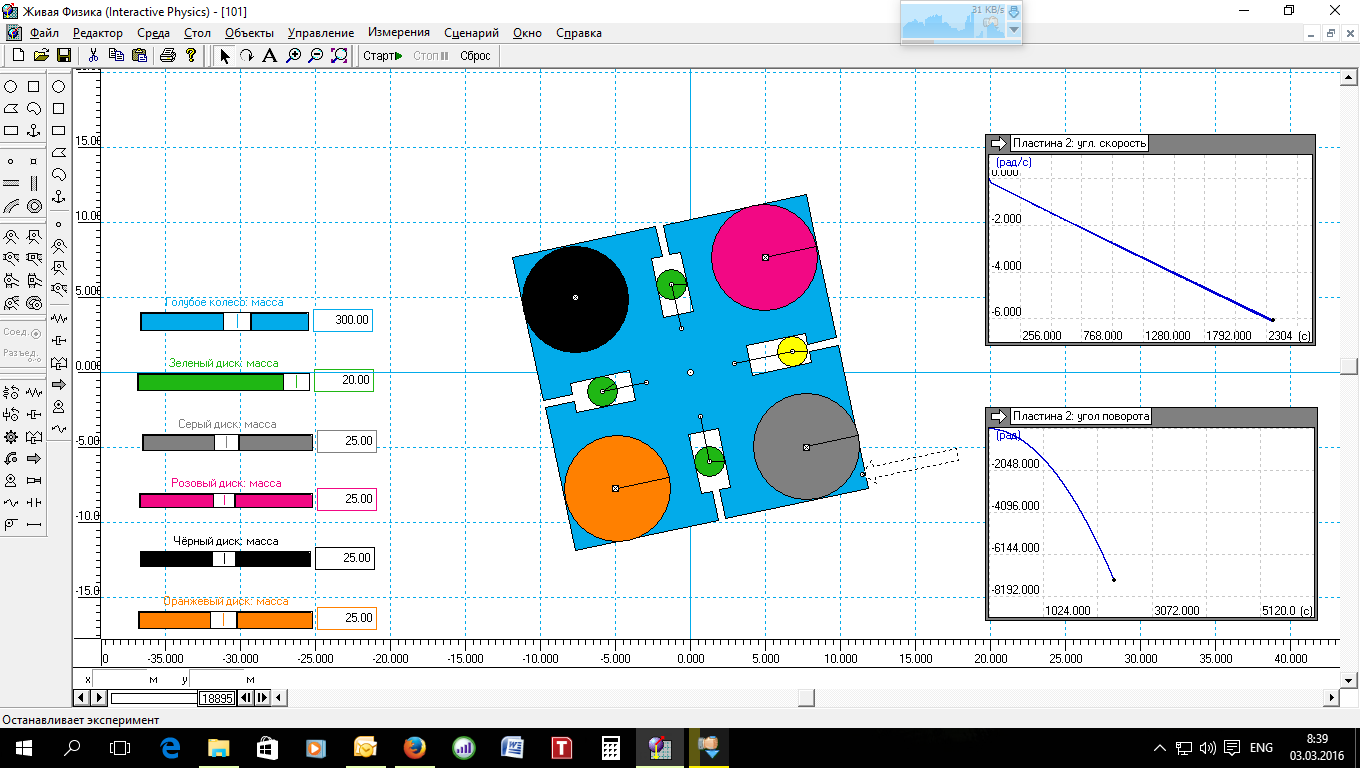
Рис.1. Результат моделирования колеса с одним грузом, совершающим вынужденные гармонические колебания с частотой вращения колеса.
За основу модели взята модель, хорошо показавшая себя в статье «О конструктивных особенностях гравитационного колеса Бесслера». Но с колеса были удалены все красные и синие диски, несущие заряд, чтобы обеспечивать перемещение подвижных зеленых дисков.
У самих зелёных дисков был «снят» заряд, так как теперь в качестве средства перемещения зелёных грузов были выбраны такие конструктивные элементы, как пруты. Но с одной особенностью. Пруты могут менять свою длину по гармоническому закону, что позволяет имитировать гармонические колебания грузов вдоль радиуса колеса. Использование прутов гарантирует колебания грузов только на основной гармонике, без возбуждения колебаний на кратных частотах, если бы в качестве удерживающих элементов использовались пружины.
Пружины, на которые возлагает надежды Петров А.М., плохи тем, что придется под заданную основную частоту колебаний подвижных вдоль радиуса колеса грузов подбирать длину и жесткость пружин, а также мучиться с подбором массы грузов. Кроме того, центробежная сила, которая обязательно будет воздействовать на подвижные грузы, будет заметно влиять на собственные колебания подвижных грузов. Да и совпадения частоты вращения колеса будут отмечаться только в единичном случае, либо в очень узком диапазоне частот, что лишает такое колесо определённой универсальности. Нам нужно колесо, чтобы оно при любой частоте вращения колеса выдавала заданную мощность и безопорную силу.
Так что использование прутов приведет к тому, что вместо собственных колебаний мы будем иметь вынужденные колебания, частотой колебаний которых можно будет управлять по простым алгоритмам. И если применить соответствующую систему подстройки частоты перемещения подвижных грузов под частоту вращения колеса, то мы в любой момент будем иметь колесо, в котором будет автоматически поддерживаться резонанс в резонансе.
Петров А.М. предлагает добиваться резонанса с помощью подбора частоты вращения колеса, считая частоту колебаний подвижных грузов первичной. Я же считаю, что конструктивно надо сразу закладывать в колебательные процесс подвижных грузов равенство частот колебаний грузов и частоты вращения колеса. В моих предыдущих моделях этот механизм, являющийся основой параметрического резонанса, прекрасно работает. Так что и в данном случае решено от него не отказываться.
Итак, на рис.1. масса голубого квадрата (колеса) 300 кг. Масса больших дисков по углам – по 25 кг. Масса зелёных и желтого дисков по 20 кг.
Внутренние концы прутов закреплены на голубом квадрате на расстоянии 3 м от оси колеса. Длина тех прутов, второй конец которого закрепляется в центре зелёных дисков, равна 3 м, а для жёлтого диска средняя длина прута равна 3 м, а во время вращения колеса его длина может изменять по гармоническому закону от 2 до 4 м, что позволяет подвижному грузу изменять свое положение относительно оси колеса от 5 до 7 м.
Чтобы прут мог изменять свою длину синхронно с углом поворота колеса, в его свойство, которое определяет длину прута, была введена формула:
3+cos(Body[2].p.r) (1),
где Body[2].p.r – угол поворота колеса.
Формула простая, и при полном обороте колеса она позволяет менять длину прута от 4 до 2 м.
Результаты моделирования такого колеса показаны на индикаторах справа от колеса. Верхний индикатор показывает угловую скорость колеса. За 2400 с угловая скорость выросла с 0 до 6 рад/с. Незначительное нарушение линейности связано с тем, что в течение первых 10 секунд колесо раскручивалось силой в 50 н. Направление силы менялось по мере вращения колеса. Дальше колесо раскручивалось за счет гармонических колебаний жёлтого груза вдоль радиуса с частотой, равной частоте вращения колеса и начальной фазой равной нулю.
Общая масса колеса 480 кг. И такое массивное колесо за 2400 с достигла угловой скорости вращения в 6 рад/с. А если учесть, что размер квадратного колеса составляет 20х20 м, то результаты моделирования можно считать просто замечательными.
Теперь посмотрим результат моделирования, но уже с двумя противоположными подвижными дисками, работающими в противофазе. Для этого в свойство «длина» прута этого диска была введена формула:
3-cos(Body[2].p.r) (2),
где Body[2].p.r – угол поворота колеса.
Формула опять получилась простая, и по сравнению с формулой (1) оказалось достаточно сменить перед косинусов угла поворота колеса плюс на минус.
Результаты моделирования показаны на рис.2.
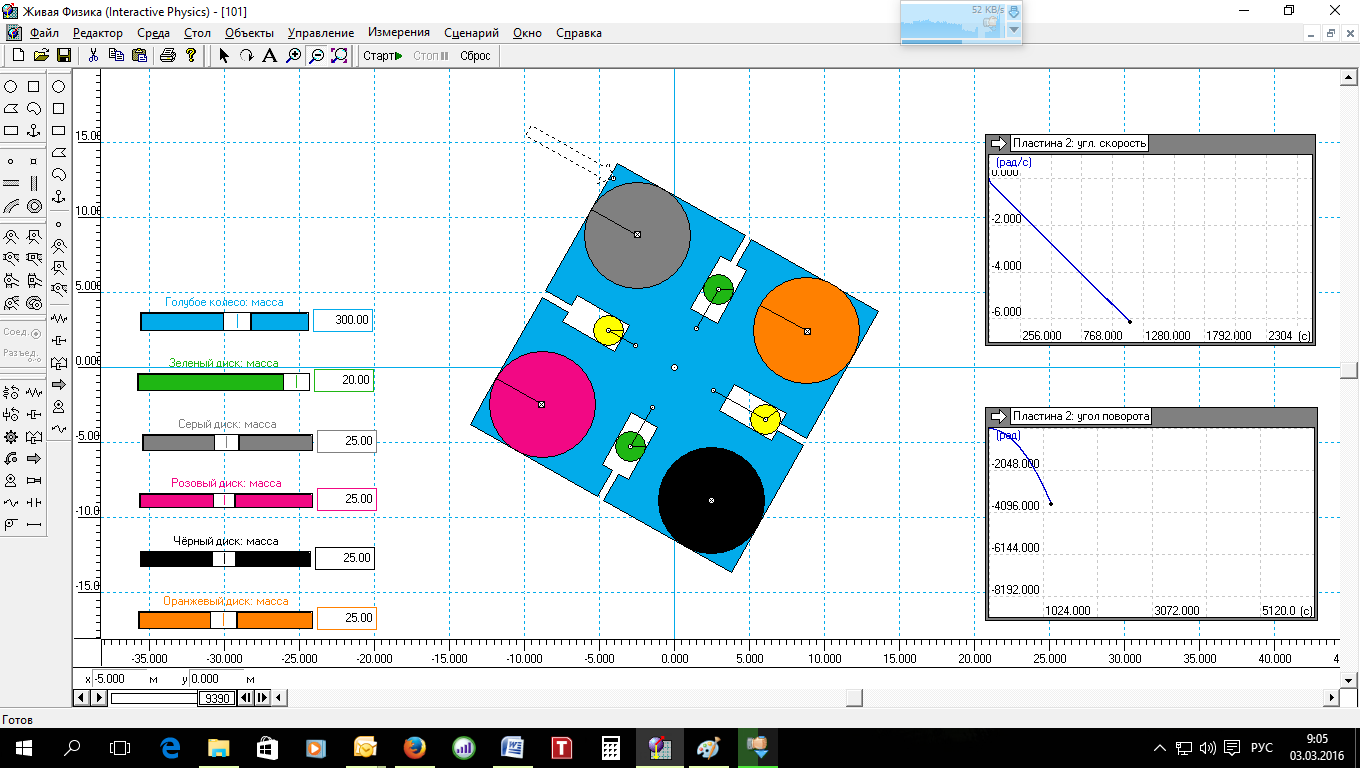
Рис.2. Результат моделирования колеса с двумя грузами, совершающими вынужденные гармонические колебания с частотой вращения колеса.
Все остальные параметры одинаковые с теми, которые были приняты в модели на рис.1. Поэтому сразу перейдём к анализу результатов моделирования, отраженных на индикаторах справа от модели.
Колесо вышло на угловую скорость в 6 рад/с за 1150 с, что в два раза меньше, аналогичного показателя первой модели. И достигнут это результат за число оборотов примерно в два раза меньше, чем в первой модели на рис.1. Это показывает, что два груза увеличили мощность колеса в два раза. Поэтому мы вправе ожидать, что 4 груза увеличат мощность колеса еще в два раза, соответственно уменьшив число оборотов и время выхода на угловую скорость в 6 рад/с.
Для этого была собрана модель три (рис.3).
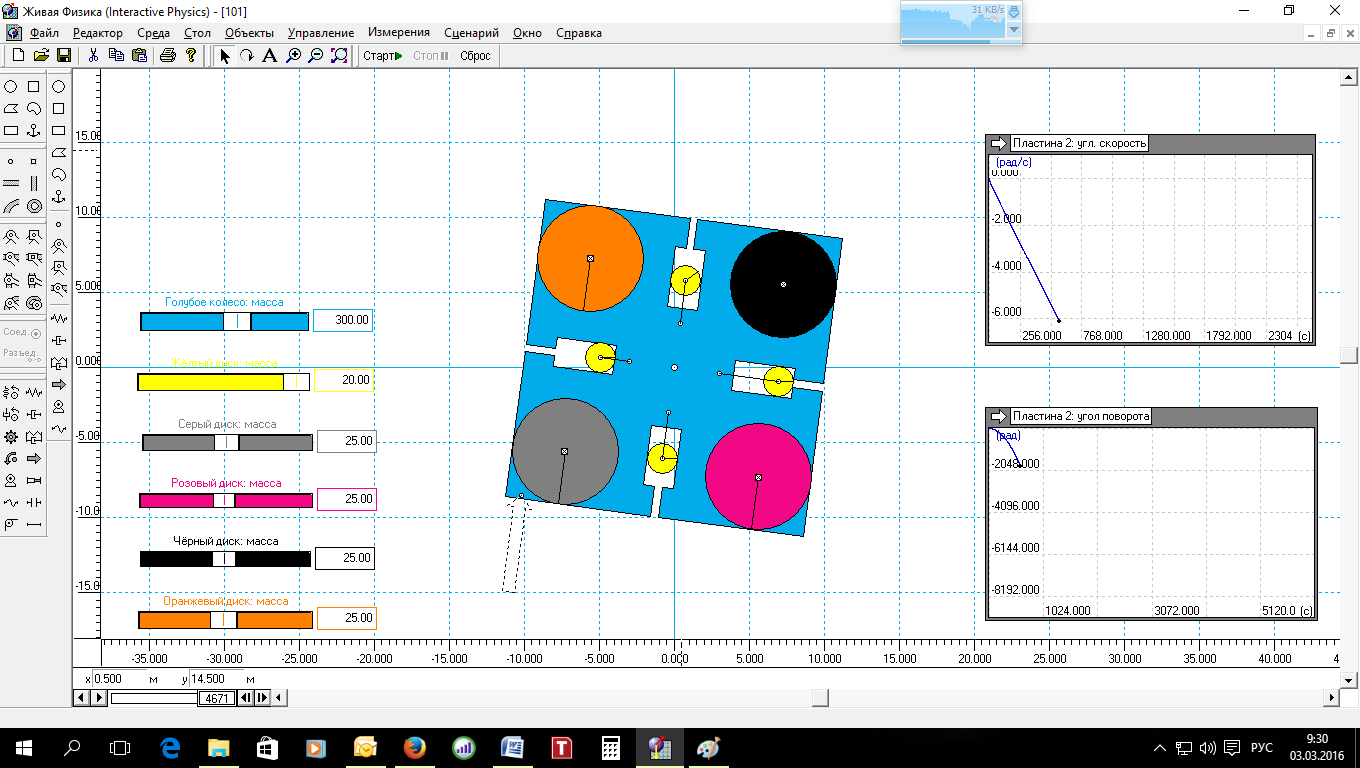
Рис.3. Результат моделирования колеса с четырьмя грузами, совершающими вынужденные гармонические колебания с частотой вращения колеса.
Теперь у нас все подвижные диски жёлтые, что указывает, что в свойствах их прутов внесены соответствующие формулы.
В свойстве «длина» верхнего диска введена формула:
3-cos(Body[2].p.r-pi()/2) (3).
А в свойстве «длина» нижнего диска введена формула немного иная:
3+cos(Body[2].p.r-pi()/2) (4)
В этих формулах учитывается, что необходим фазовый сдвиг по сравнению с формулами (1) и (2).
Во время прогонки модели можно было наблюдать, как пруты меняют свою длину, и грузы в половине своей траектории приближаются к правому краю колеса, а на другой стороне грузы приближаются к центру колеса. В результате, колесо всегда оказывается неуравновешенным. Центр тяжести смещается вправо.
Как мы и ожидали, мощность колеса выросла в два раза, а также в два раза быстрее колесо вышло на угловую скорость 6 рад/с.
Колесо вращается не только потому, что центр тяжести смещен вправо, так же как и в колесе Альдо Коста. Но и потому, что грузы смещаются вдоль радиуса по гармоническому закону. А во вращающемся колесе уже действуют дополнительные силы. Например, силы Кориолиса. А также происходят не отраженные в современных теориях вращающего колеса последствия перемещения подвижных тел вдоль радиусов колеса. Там ведь локально изменяется в первую очередь момент инерции самого подвижного тела относительно центра колеса.
Видимо, есть основания считать, что перемещаемый во вращающемся колесе вдоль радиуса груз ведет себя как электрически заряженная частица в магнитном поле. На груз действует механический аналог силы Лоренца. Эта сила зависит как от массы перемещаемого в колесе груза, там и среднего момента инерции колеса.
И именно эта сила и заставляет колесо увеличивать угловую скорость с ускорением большим, чем это следовало бы, если бы колесо разгонялось теми порциями энергии, которые передаются колесу при совершении работы по перемещению подвижных грузов вдоль радиуса колеса.
Для проверки того, что результаты моделирования зависят не только от массы подвижных грузов, но и массы колеса в целом, проведено очередное моделирование, где колесо было сделано максимально тяжелым по массе – 780 кг (рис.4).
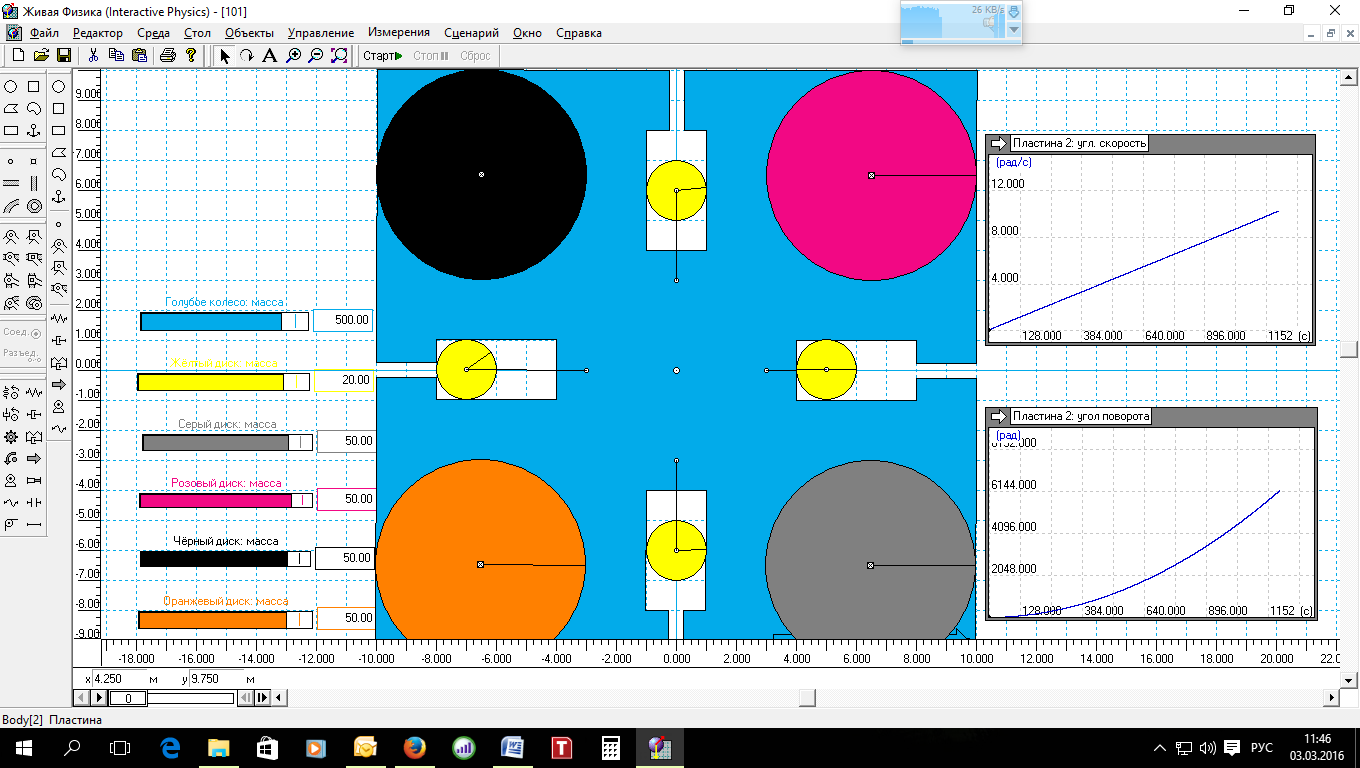
Рис.4. Результаты проверки теории Петрова А.М. на максимально массивном колесе.
Угловой скорости 6 рад/с колесо достигло за 760 с. Совершив при этом оборотов на 2500 радиан. Это очень неплохой показатель. При этом масса увеличилась по сравнению с третьей моделью с 480 кг до 780 кг – 1,6 раза. А вот время разгона увеличилось с 550 до 750 с – в 1,4 раза. То есть, в первом приближении, мы получаем, что удельное время разгона до 6 рад/с с увеличение массы уменьшается. Получается, что массивные колеса разгонять до заданной угловой скорости энергетически выгоднее. Но это пока только первые выводы.
Важным вопросом для сторонников и противников вечных двигателей является соотношением между затратами энергии на систему управления вращением и получаемой с вала энергии. Полученные результаты моделирования позволяют дать первое заключение. Работа, которая совершается системой управления по перемещению подвижных грузов внутри вращающегося колеса в поле тяготения Земли от цикла к циклу, поглощаются колесом равными порциями. Но это означает, что частота вращения колеса должна расти по кривой, обратной параболе второй степени, то есть, темпы прироста энергии должны по мере увеличения угловой скорости колеса уменьшаться. В действительности, частота вращения колеса (угловая скорость) растет по линейному закону, а число совершённых оборотов – по параболе.
Кроме того, обнаружён интересный эффект резонанса в резонансе. По мере «накачки» колеса энергией за счет параметрического резонанса частота вращения колеса всё время нарастает. И вот это у меня вызывает некоторую тревогу. Дело в том, что это является важным свойством параметрического резонанса, на которое мало кто обращает внимание, требует к параметрическому резонансу особенного внимания.
Некоторые изобретатели и исследователи считают. Что для параметрического резонанса задающие импульсы должны быть обязательно импульсными, то есть в виде серии прямоугольных положительных коротких по времени импульсов, нужной частоты, скважности и фазы по отношению к частоте «разгоняемой» системы. В данной статье показано, что это не обязательно. Главное, чтобы соблюдалось соотношение, необходимое и достаточное для параметрического резонанса частота колебаний задающего генератора должны быть в два раза выше частоты колебаний основного контура.
Никола Тесла в одной из своих работ писал, что он мог бы с помощью резонанса расколоть Землю. Оценивая полученные при моделировании колес результаты, могу уверенно сказать, что это вполне возможно. Ибо для разрушения Земли достаточно настроить параметрический резонанс на частоту Шумана. И осуществлять этот резонанс целенаправленно как по времени, так и по направлению импульсов, сидя где-нибудь глубоко под землёй. Например, в коллайдере под Цюрихом.
Можно организовать параметрический резонанс с помощью системы ХААРП. И если раскачивать колебания в ионосфере в течение длительного времени, постоянно подстраивая частоту параметрических колебаний под частоту колебаний в ионосфере, то можно сильно нагадить другим странам.
Правда и без ХААРП на Земле достаточно всяких генераторов. Например, целая армия генераторов работает на частоте переменного тока в 50 гц. Значит, на этой частоте вполне может сформироваться параметрический резонанс для тех систем, где основная частота равна 25 гц. Даже такой фактор, как военные действия с разного рода взрывами, способны вызвать самые неожиданные явления в земной коре.
Поэтому, считаю, нет ничего удивительного, что в последнее время на Земле участились землетрясения, ураганы, засухи, потопы, цунами и прочие радости «от Природы». Видимо, кто-то, у кого есть техническая возможность и лишняя энергия, пытается через организацию параметрического резонанса нанести вред своим историческим конкурентам. А кто-то другой пытается им противодействовать, расстраивая этот параметрический резонанс. И всё вместе представляется для нас как некие природные тенденции к потеплению или похолоданию с шумным трёпом по ТВ и в СМИ.
Мол, виноват СО2. Вот его и избивают, кому не лень. А об истинных причинах «природных» катаклизмов стараются не говорить, чтобы не привлекать внимание народов к тому, что некие силы приговорили человечество к уничтожению.
Считаю, что проведенные моделирования подтверждают теорию Петрова А.М. Только в неё надо внести поправки, не мудрить с разного рода грузами на пружинках, совершающих свободные колебания вдоль радиуса колеса. Надо брать быка за рога, и вместо свободных колебаний заставлять грузы совершать вынужденные колебания без всяких гармоник с частотой, равной частоте вращения колеса. И для этого надо страивать в гравитационные колеса, а заодно, и в маятники, системы для управления параметрическим резонансом. Всё в мире управляемо. И это должно нас обнадёживать, ибо мы можем сами управлять как нашим настоящим, так и нашим будущим. Надо только сильно захотеть.
Литература:
03.03.2016