Пытаясь путём моделирования в программе «Живая физика» проанализировать поведение параметрических колёс и маятников, мне пришлось в первых моделях для перемещения подвижных грузов задействовать электростатику. Для этого грузу, который должен перемещаться в заранее заданных пределах вдоль радиуса от центра к периферии и обратно, кроме массы придавался заряд. Как правило, величина заряда была от 1е-4 до 1е-3 кулона.
Кроме этого, на колесе или маятнике размещались диски, которым тоже кроме массы задавался заряд, величина которого тоже могла меняться от 1е-4 до 1е-3 кулона. Использовался либо один заряженный диск, либо два диска противоположно заряженные. В последнем варианте создавался своеобразный диполь. А подвижный груз-заряд за счет смены полярности мог перемещаться от одного заряда такого диполя к другому.
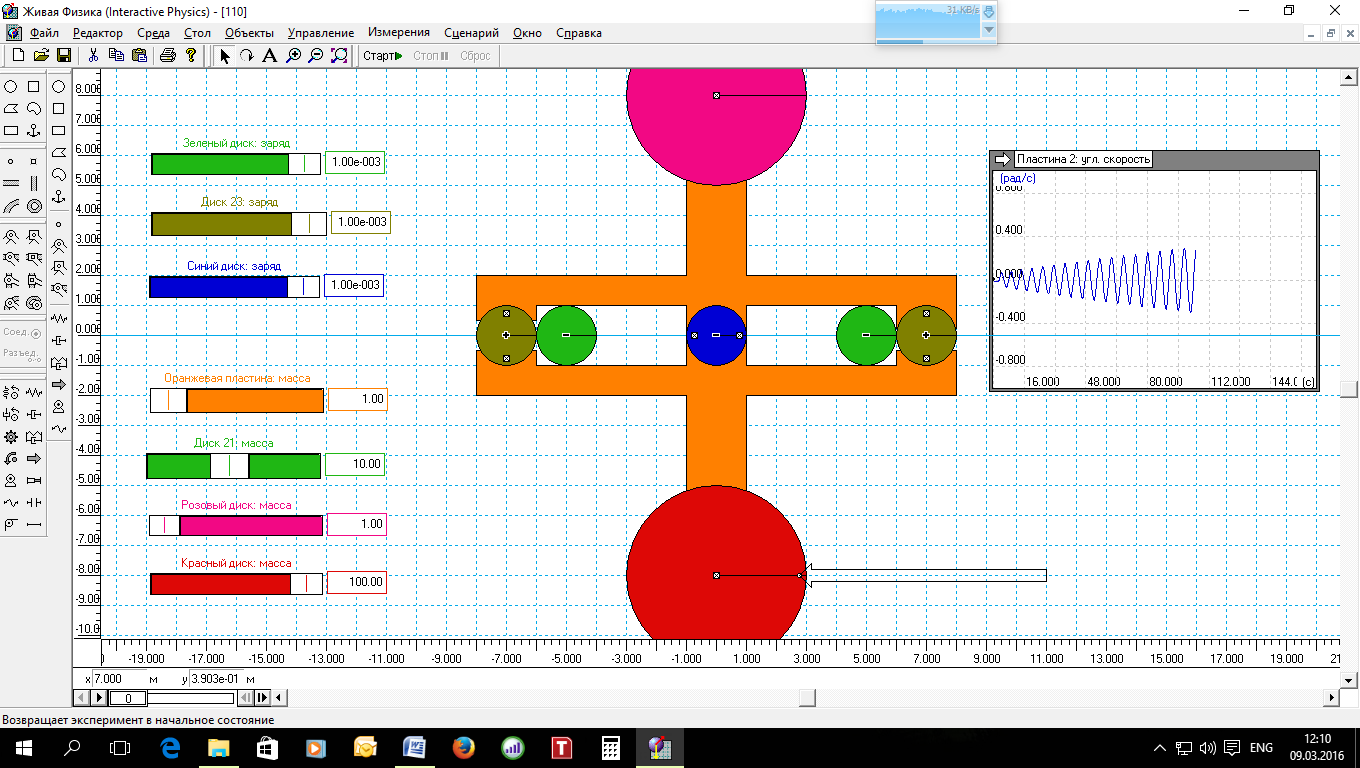
И тут выяснилось, что при одной полярности подвижного груза маятник раскачивался. Например, как на рис.1.
Рис.1.
Это модель маятника, у которого масса красного нижнего диска равна 100 кг, а розового – 1 кг. Масса каждого зеленного диска 10 кг, а их заряд по абсолютной величине равен 1е-3 к, но в рависимости от положения центра зеленного диска относительно горизонтали, проходящей через ось маятника, заряд мог принимать положительное или отрицательное значения. Начальная раскачка маятника обеспечивалась горизонтальной силой в 50 н., которая действовала на красный диск в течении 3 с.
У бурых и синего дисков заряд по абсолютной величине тоже равен 1е-3 к, но знак заряда у бурых дисков – положительный, а у синего отрицательный. Поэтому, когда надо было переместить зеленный диск в краю диска, то ему придавался отрицательный заряд, а когда надо было переместить зеленный диск ближе к оси, то положительный.
Отрицательным заряд зеленных дисков стаоновился тогда, когда они поднимались выше горизонтальной линии, проходящей через ось маятника, и положительный, когда центр зеленого диска опускался ниже этой горизонтали. Поэтому, когда груз поднимался выше горизонтали, то он отодвигался от оси, а когда опускался ниже горизонтали, то приближался к оси. И такой простой алгоритм приводил в итоге к раскачке маятника. Что подтвержадет на рис.1. показания индикатора справа от модели.
Когда же алгоритм менялся на противоположеный, то у предварительно слегка раскаченного маятника колебания затухали (рис.2). Механизм первоначальной раскачки прежний.
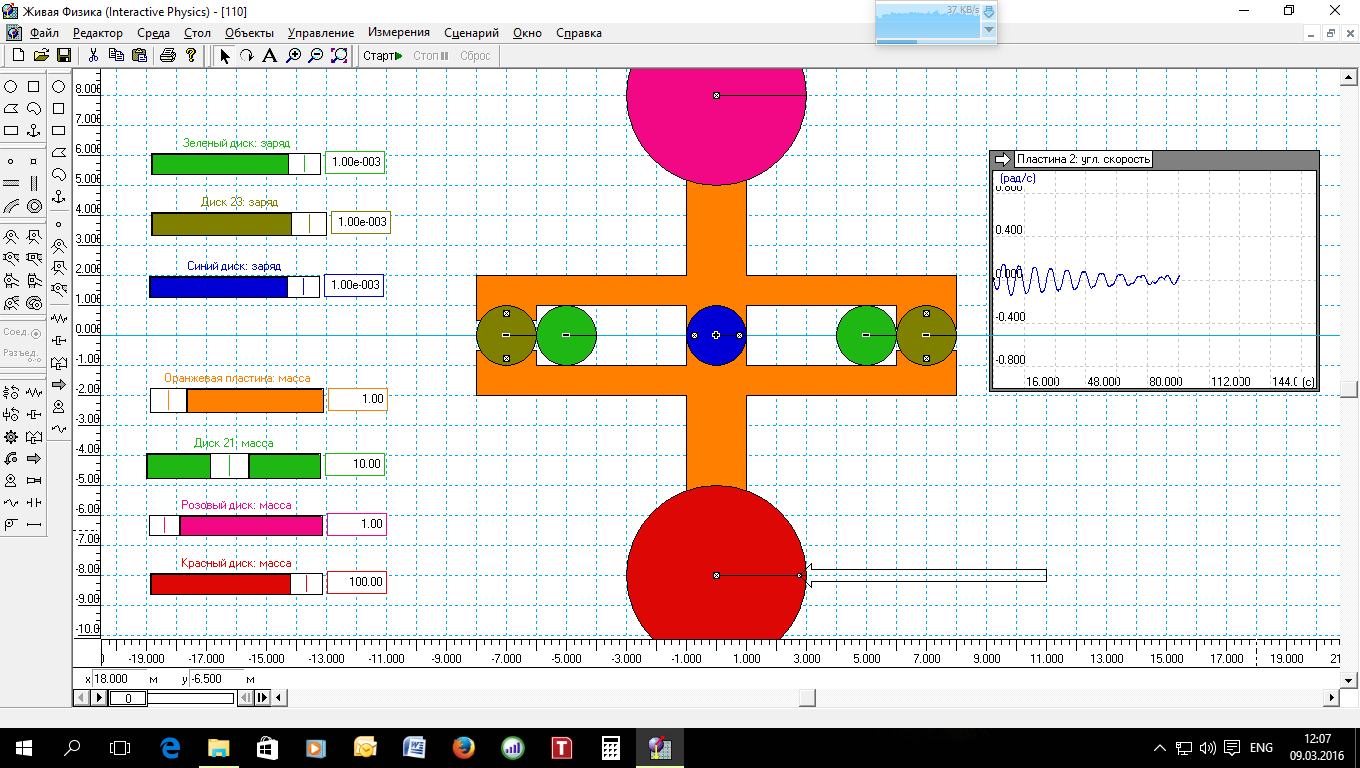
Рис.2.
В данной модели полярность и величина заряда зеленных дисков осталась прежней, а вот заряд бурых и синего диска был изменен на противоположный. На индикаторе справа от модели маятника четко видно, как колебания затухают.
Заподозрив, что в этих моделях вместо некой воображаемой механической поперечной силы типа силы Лоренца маятник раскачивает или останавливает настоящая сила Лоренца, я решил избавиться от электростатики полностью, а грузы перемещать посредством управления длинной прутов. Но в процессе наблюдения за разными моделями выявился неприятный эффект. Дело в том, что длина прута менялась резко, а это при значительных изменениях длины прута оказывалось не по зубам тем численным алгоритмам, которые используются в «Живой физике». Очень быстро начинала проявляться неустойчивость вычислений и модель «разваливалась» или просто останавливалась, а затем после долгого «раздумья» улетала в неизвестном направлении. Поэтому пришлось ограничиться небольшими «перепадами» в длине прутов, максимальная длина прута была выбрана всего на метр больше минимальной. В этом случае модель работала устойчиво.
Вначале был проверен алгоритм Бесселя, как его я назвал, - если зеленный диск поднимался выше оси маятника, то он отодвигался от оси, если ниже, то приближался к оси. Формула такова:
if(body[22].p.у>0,4,3) (1)
Максимальная длина прута, удерживающего зеленный груз – 4 м, минимальный – 3 м. Результат моделирования на рис.3. Механизм начальной раскачки маятника прежний.
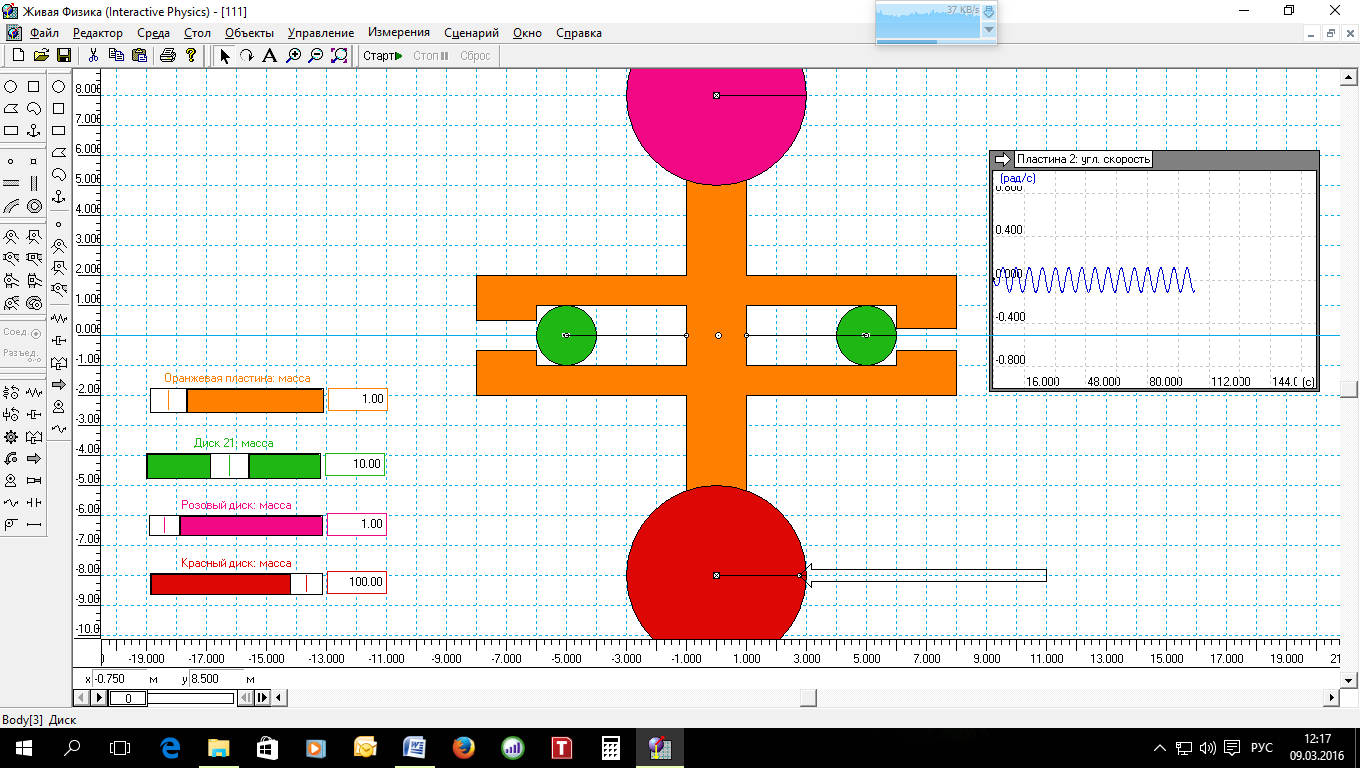
Рис.3.
Электростатика отключена. Все регуляторы удалены. Удалены и бурые и синий диски. Теперь перемещение зеленых дисков обеспечивается за счет изменения длины прутов. Результат моделирования показан на индикаторе – выбранный механизм управления параметрическим резонансом не работает. Амплитуда колебаний маятника в течении достаточно длительного отрезка времени не меняется.
Тогда решено изменить алгоритм на противоположенный. Когда зелёный груз опускался ниже оси, то прут удлинялся до 4 м, а когда поднимался выше оси, то укорачивался до 3 м.
Результат моделирования показан на рис.4. Механизм первоначальной раскачки маятника прежний. Формула:
if(body[22].p.у<0,4,3) (2)
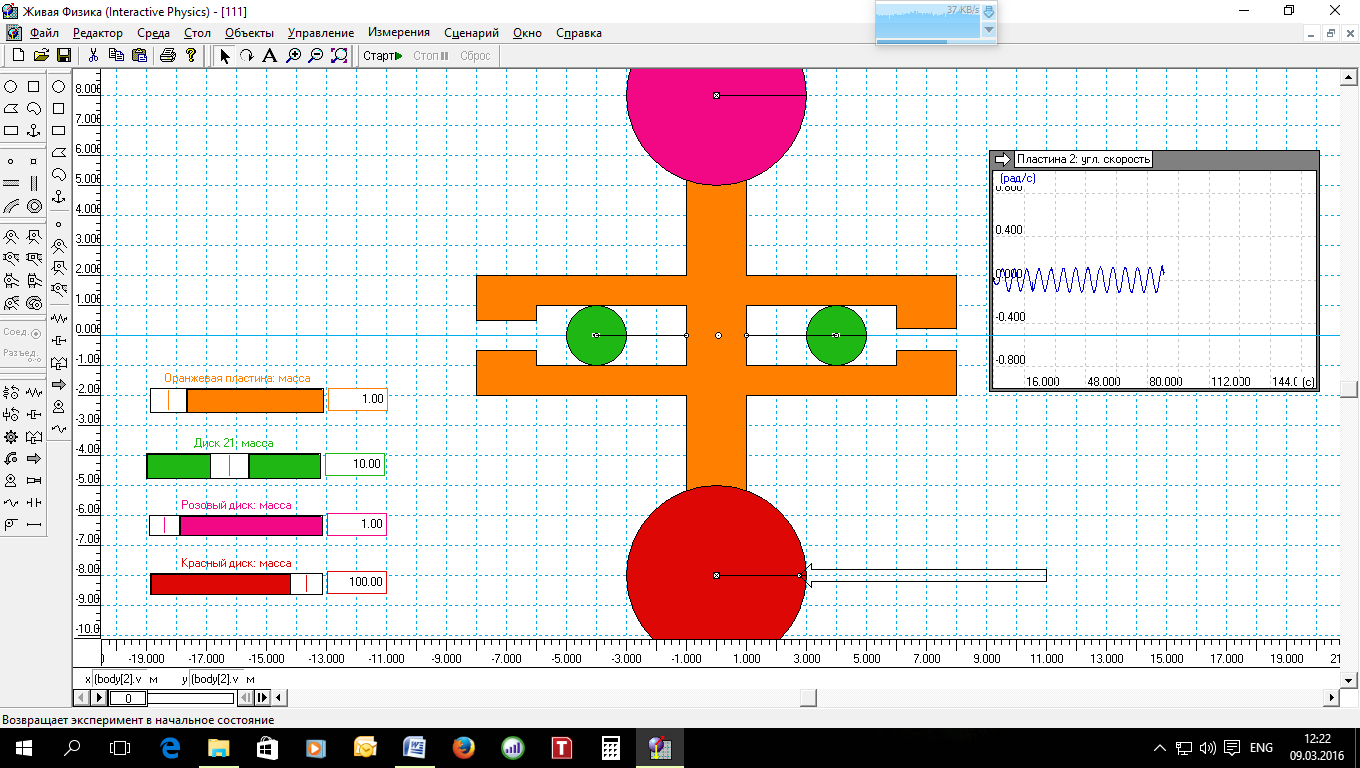
Рис.4.
Результат моделирования тот же самый, что и на рис.3. Первоначально раскаченный маятник не изменял амплитуды колебаний в течение длительного времени. Что указывает на то, что проверяемый алгоритм не годится для параметрического возбуждения маятника.
После анализа поведения 4-х моделей стало ясно, что в первых двух моделях маятник раскачивался или останавливался с помощью самой настоящей силы Лоренца. Когда сила Лоренца была направлена по ходу вращения маятника (колеса), то она раскачивала маятник (раскручивала колесо). Если же сила была направлена против, то происходила остановка маятника или колеса.
Чтобы окончательно убедиться в правоте, решено было проверить на двух моделях алгоритм, который уже был опробован на моделях в других статьях, и показал себя замечательно при моделировании параметрического маятника. Этот алгоритм учитывает как направление вращения маятника (колеса), так и положение перемещаемого груза относительно вертикальной линии, проходящей через ось маятника (колеса).
Формула для определения длины прута выглядит так:
if(body[22].p.x*body[2].v.r<0,4,3) (3)
где body[22].p.x – это положение центра зеленого диска относительно оси маятника на оси X, а body[2].v.r - это угловая скорость вращения оранжевой пластины.
Когда произведение этих величин меньше нуля, то есть когда центр body[22] опускается вниз, то прут, держащий этот зеленый груз, удлиняется до 4 м. А когда груз поднимается, то прут укорачивается до 3 м. Вместо такого сложного условия, можно взять скорость движения центра зеленого диска по вертикали. Когда скорость будет направлена вниз, то длина прута должна быть равна 4 м, а когда скорость будет направлена вверх, то длина прута должны быть равна 3 м. Но тогда скорость перемещения надо снимать не с зеленых дисков, а устанавливать в качестве индикаторов скорости отдельные элементы (диски, квадраты), которые будут жёстко связаны с оранжевой пластиной. Ибо всякое изменение длины прута будет отражаться на скорости перемещения зеленого диска, что в итоге может парализовать работу модели.
На рис.5 показано, как ведет себя маятник, если смещение зеленных грузов определяется формулой (3).
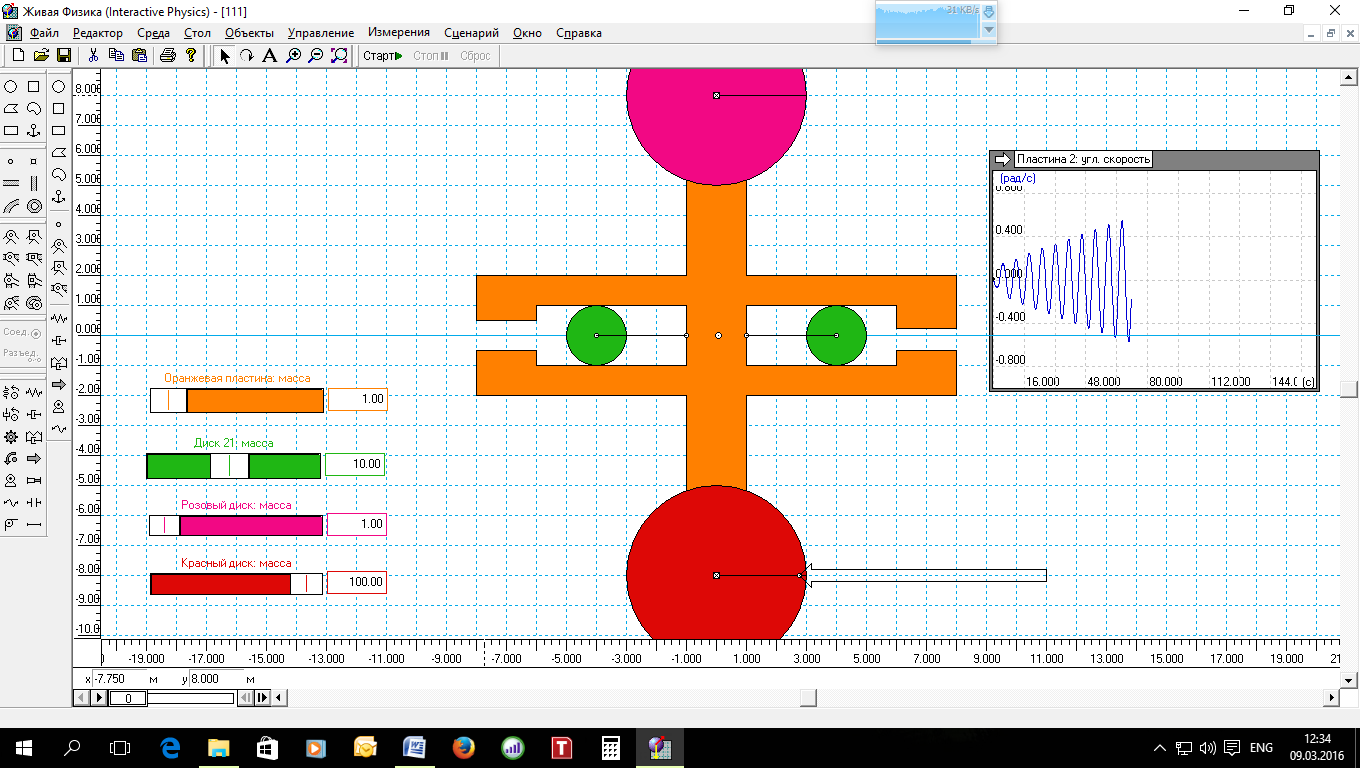
Рис.5.
Вывод напрашивается сам собой. Маятник раскачивается гораздо сильнее, чем на рис.1. Хотя зеленый груз на рис.1 смещается на 3 м, а на рис.5 всего на 1 м. Это и понятно, так как формула (3) не просто обеспечивает смещение грузов, но и обеспечивает смещение центра тяжести маятника в ту сторону, на какой груз опускается вниз. Этот алгоритм можно назвать обобщённым алгоритмом Альдо Коста, но при этом он автоматически работает при вращении колеса в любую сторону, а у маятника это происходит само собой. Именно по такому алгоритму действуют люди, когда качаются на взрослых качелях.
Причём раскачка маятника прекрасно работает при любой начальной, даже еле заметной амплитуде. На рис. 5 сила, воздействующая на красный диск в течении 3 с равна 50 н. Но уменьшение этой силы до 10 н практически не сказалось на поведении маятника на 70-80 сек.
Если же вместо формулы (3) использовалась формула (4)
if(body[22].p.x*body[2].v.r>0,4,3) (4),
то вместо раскачивания маятник постепенно останавливался (рис.6). Хотя для первоначальной раскачки маятника использовалась сила в 100 н, действующая в течении 3 с.
А сами колебания затухли в течении 32 с.
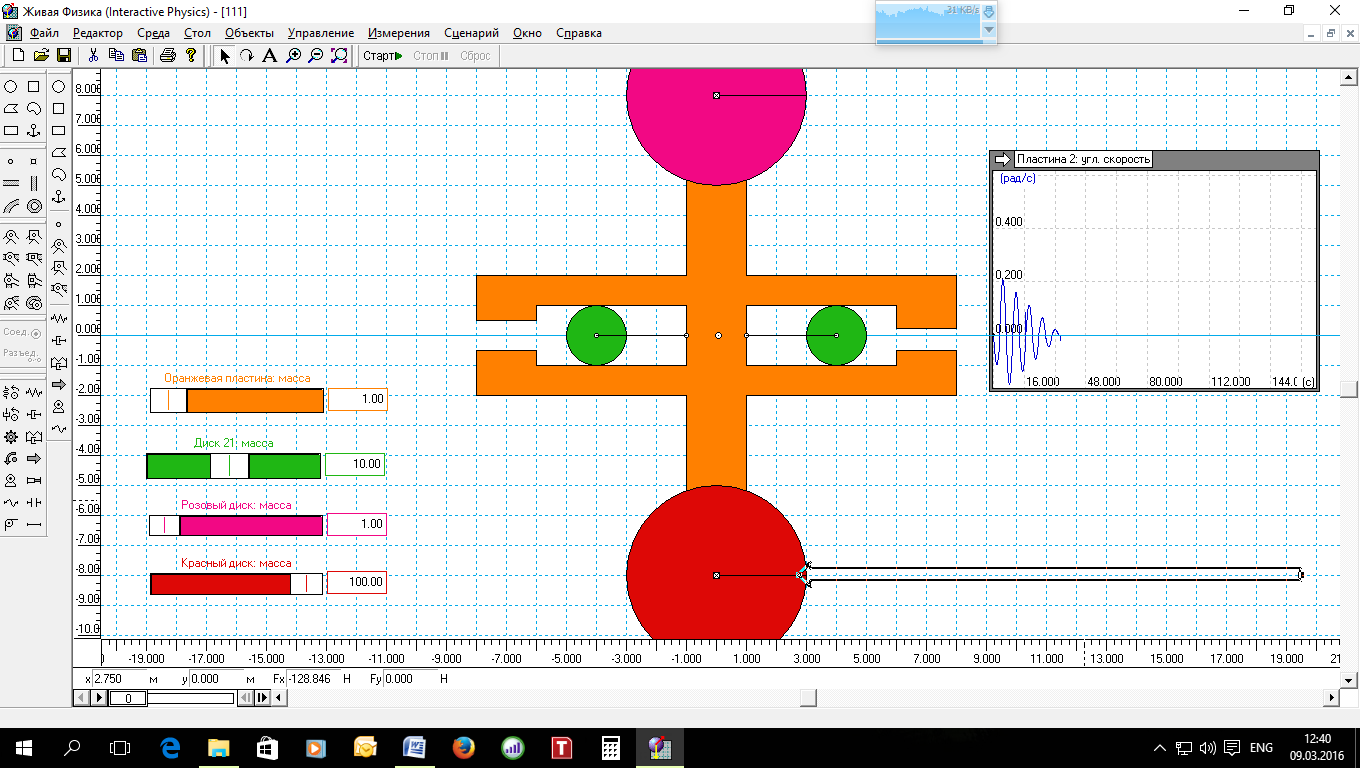
Рис.6.
В процессе моделирования обнаружилась неприятная особенность. Зеленные грузы иногда «выскакивали» из тех «прорезей», по которым они должны были перемещаться. Поэтому эта модель была улучшена. И введены пружины, которые удерживали грузы (рис.7).
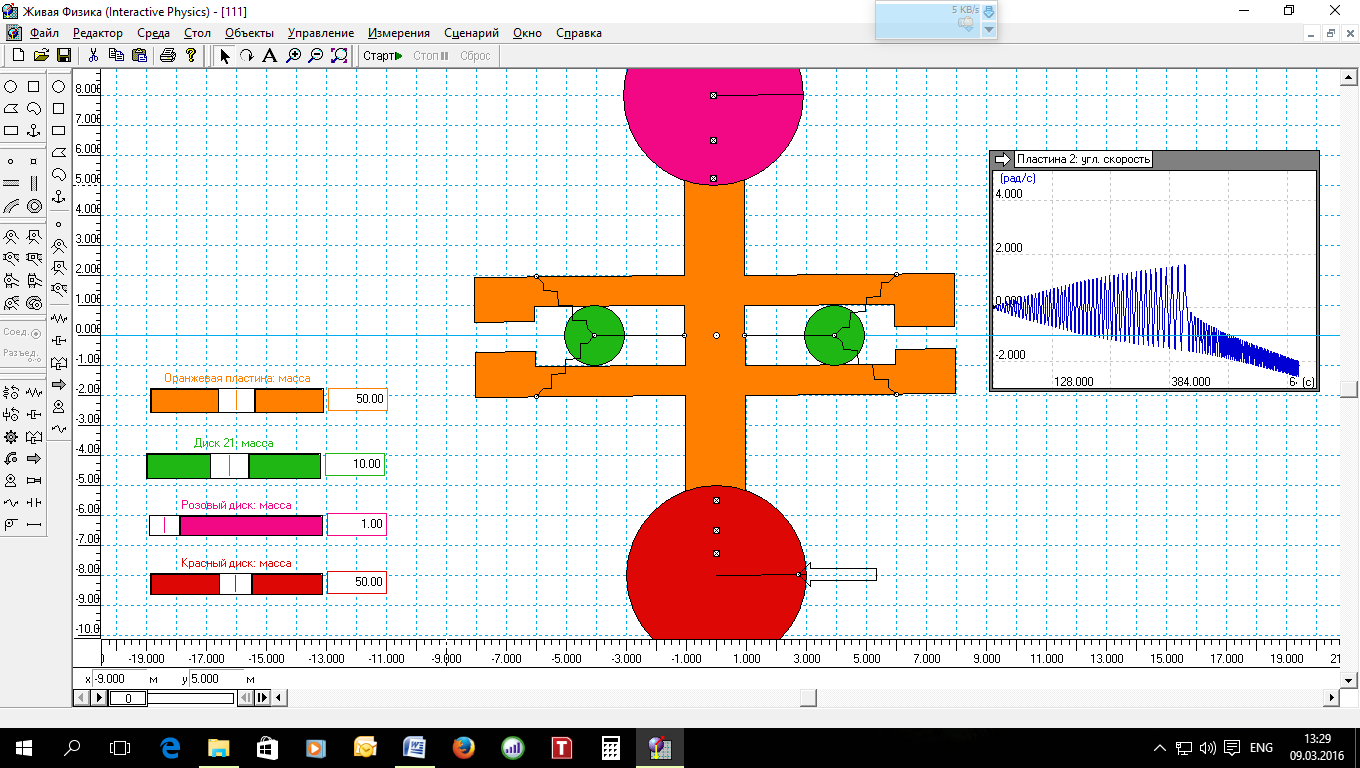
Рис.7.
Масса оранжевой пластины равна 50 кг, красного диска тоже равна 50 кг, сила – 10 н. Но теперь моделирование велось до тех пор, пока маятник не переходил во вращение. Этот момент наступил примерно на 420 с. Далее видно, как маятник постепенно увеличивал частоту вращения. Эксперимент прерван на 610 сек.
На следующем рис.8 модель уже другая. Масса красного диска – 1 кг, розового – 100 кг.
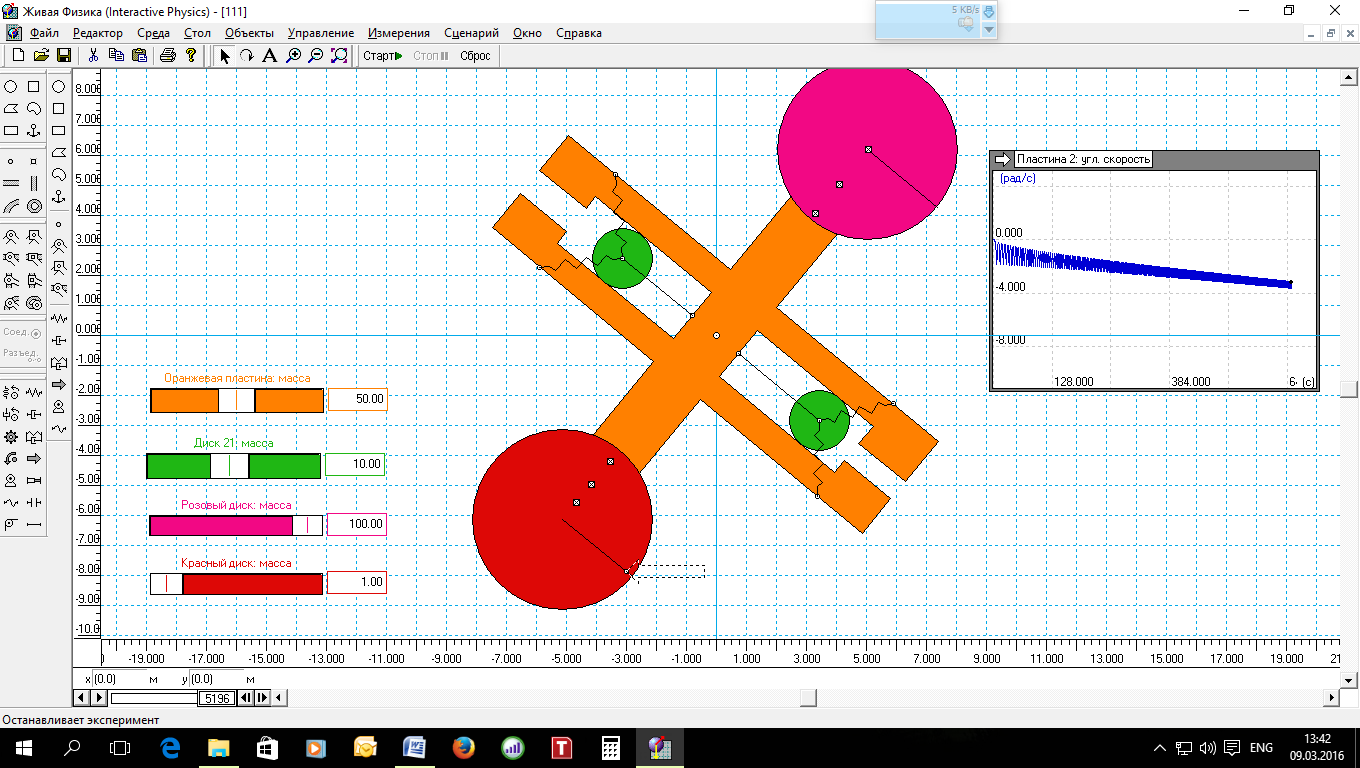
Рис.8.
В данной модели, так как розовый диск находится сверху, маятник буквально с первого оборота переходит во вращение. За 600 с угловая скорость стала равна 4 рад/с. То есть, и в данной модели принятый алгоритм показал неплохие результаты.
После проведения экспериментов с 8 разными моделями можно сделать выводы, что следует критически относиться к результатам экспериментов. То, что я вначале при моделировании маятника и колеса Бесслера принимал за механический аналог силы Лоренца, оказалось самой настоящей силой Лоренца. Возможно, другим удастся использовать обнаруженный мной эффект. Например, в электростатических или обычных электромагнитных моторах. Ибо сила Лоренца – это аналог подъемной силы. И действует она перпендикулярно направлению перемещению электрического заряда. Скорее всего, это дело будущего.
Думаю, что в обычных моторах сила Лоренца возникает, но из-за особенностей обмоток ток, протекающий в одном направлении, и ток, протекающий в обратном направлении, создают силы Лоренца, направление в противоположные направления. И поэтому эти силы в обычном моторе себя не проявляют. Но если их выделить и заставить работать… Пока это фантастика.
Что касается того, как лучше организовать механический параметрический резонанс в колесах и маятниках, то и тут был проверен достаточно универсальный алгоритм, который может быть положен в основу перемещения подвижных грузов. Для колеса это, по сути, превращается в алгоритм Альдо Коста, но при этом колесо прекрасно вращается в любую сторону. А маятники могут быть любой конструкции – детские качели с двумя подвижными грузами на концах, взрослые качели с одним подвижным грузом, маятник Бесслера с двумя подвижными легкими грузами на уровне оси и большим грузом внизу.
Конечно, в показанных моделях специально не вводилась нагрузка на ось, например, применением такого элемента, как демпфер оси. В данной статье не ставилась задача показать, что параметрические маятники способны совершать большее, чем просто вращать себя вокруг оси. Была задача выявить возможность использования электростатики для организации параметрического механического резонанса, а также сравнение механических и электростатических механизмов возбуждения параметрического резонанса. Анализ показал, что электростатические поля и заряженные грузы позволяют создавать параметрические системы, но как это реализовать практически еще не ясно. А вот механические способы возбуждения параметрического резонанса можно использовать уже сейчас. И для этого нужна воля не академиков, а обычная воля обычного российского инженера.
10.03.2016.