Власов В.Н.
Величайшая Революция в Механике 4.
Учет центробежных сил, возникающих в некоторых конструкциях и превращающих их в так называемые сверх'единичные устройства – моторы и генераторы, повзволяет понять этот механизм сверх’единичности. Теперь стало возможным объяснить принцип работы электростанции и инертора Линевича буквально на пальцах. С такой же лёгкостью раскрывается перед нами чудесные качества качалки Милковича. Но это всё некие частные случаи, которые нуждаются в дальнейшем осмыслении, чтобы в будущем научиться превращать в сверх'единичные генераторы самые простые конструкции.
В статье «Величайшая Революция в Механике 3» мной был приведен схематический график, поясняющий роль центробежной силы при движении некого тела из начальной в конечную точку, некоторые участки траектории которой могут быть искривлены. Траекторию можно представить в трехмерном пространстве, но для простоты представим, что тело движется по криволинейной траектории в плоскости XY.
Это показано на рис.1, из которого следует множество интересных выводов. Самый главный вывод заключается в том, что центробежная сила Fц не отражается на энергетическом балансе тела, расчитанного вдоль траектории. То есть, закон сохранения энергии в привычном для ученых виде центробежная сила не нарушает.
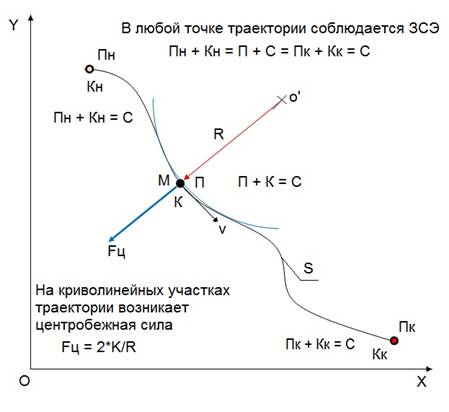
Рис.1. Закономерности при движении тела по криволинейной траектории.
С другой стороны, центробежная сила является проявлением некого динамически перемещающегося вместе с самим телом поля инерции, которое по своим свойствам ничем не отличается от гравитационного поля. Это поле налагается на внешнее поле, в рамках которого соблюдается закон сохранения энергии, но при этом результирующее поле оказывает на тело некое воздействие, создает некую тягу, которую можно использовать для тех или иных целей.
Все мы в детстве любили качаться на качелях и даже с возрастом любим покачаться на них. И каждый может вспомнить те ощущения, которые возникали или возникают при этом. Это ощущение частичной потери веса в верхнем положении и нарастание перегрузок в нижнем положении. И чем больше амплитуда колебаний качелей, тем легче становится тело в верхней точке (а их две) и больше перегрузка в нижней точке. И от этой смены ощущений захватывает дух. Но с возрастом эти ощущения как-то забываются, а академики об этих фактах, похоже, забывают напрочь. И поэтому мы до сих пор коптим небо продуктами сгорания нефтепродуктов, а в космос летаем на крайне неэффективных и опасных для Природы и Земли ракетах.
Возьмем известный всем математический маятник. Вот как определяет математический маятник БСЭ: Математический маятник - это материальная точка, совершающая под действием силы тяжести колебания вдоль дуги окружности, расположенной в вертикальной плоскости. Практически М. м. можно считать груз, подвешенный на нерастяжимой нити, если размеры груза очень малы по сравнению с длиной нити, масса нити очень мала по сравнению с массой груза.
Приведем пример, как преподносится теория математического маятника в энциклопедии «PHYSBOOK.RU».
Математический маятник. Период колебаний математического маятника
Математическим маятником называют материальную точку, подвешенную на невесомой и нерастяжимой нити, прикрепленной к подвесу и находящейся в поле силы тяжести (или иной силы).
Исследуем колебания математического маятника в инерциальной системе отсчета, относительно которой точка его подвеса находится в покое или движется равномерно прямолинейно. Силой сопротивления воздуха будем пренебрегать (идеальный математический маятник). Первоначально маятник покоится в положении равновесия С. При этом действующие на него сила тяжести F⃗ и сила упругости F⃗ ynp нити взаимно компенсируются.
Выведем маятник из положения равновесия (отклонив его, например, в положение А) и отпустим без начальной скорости (рис. 13.11). В этом случае силы F⃗ и F⃗ ynp не уравновешивают друг друга. Тангенциальная составляющая силы тяжести F⃗ τ, действуя на маятник, сообщает ему тангенциальное ускорение a⃗ τ (составляющая полного ускорения, направленная вдоль касательной к траектории движения математического маятника), и маятник начинает двигаться к положению равновесия с возрастающей по модулю скоростью. Тангенциальная составляющая силы тяжести F⃗ τ является, таким образом, возвращающей силой. Нормальная составляющая F⃗ n силы тяжести направлена вдоль нити против силы упругости F⃗ ynp. Равнодействующая сил F⃗ n и F⃗ ynp сообщает маятнику нормальное ускорение an, которое изменяет при этом направление вектора скорости, и маятник движется по дуге ABCD.
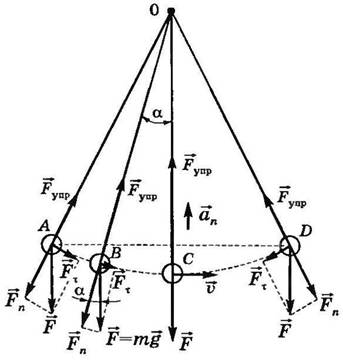
Рис. 13.11
Чем ближе подходит маятник к положению равновесия С, тем меньше становится значение тангенциальной составляющей Fτ=Fsinα. В положении равновесия она равна нулю, а скорость достигает максимального значения, и маятник движется по инерции дальше, поднимаясь по дуге вверх. При этом составляющая F⃗ τ направлена против скорости. С увеличением угла отклонения а модуль силы F⃗ τ увеличивается, а модуль скорости уменьшается, и в точке D скорость маятника становится равной нулю. Маятник на мгновение останавливается, а затем начинает двигаться в обратном направлении к положению равновесия. Вновь пройдя его по инерции, маятник, замедляя движение, дойдет до точки А (трение отсутствует), т.е. совершит полное колебание. После этого движение маятника будет повторяться в уже описанной последовательности.
Получим уравнение, описывающее свободные колебания математического маятника.
Пусть маятник в данный момент времени находится в точке В. Его смещение S от положения равновесия в этот момент равно длине дуги СВ (т.е. S = |СВ|). Обозначим длину нити подвеса l, а массу маятника — m.
Из рисунка 13.11 видно, что Fτ=Fsinα, где α=Sl. При малых углах (α<10∘) отклонения маятника sinα≈α, поэтому
Fτ=−FSl=−mgSl.
Знак минус в этой формуле ставят потому, что тангенциальная составляющая силы тяжести направлена к положению равновесия, а смещение отсчитывают от положения равновесия.
Согласно второму закону Ньютона ma⃗ =mg⃗ +Fynp. Спроецируем векторные величины этого уравнения на направление касательной к траектории движения математического маятника
Fτ=maτ.
Из этих уравнений получим
aτ=−glS — динамическое уравнение движения математического маятника. Тангенциальное ускорение математического маятника пропорционально его смещению и направлено к положению равновесия. Это уравнение можно записать в виде
aτ+glS=0
. Сравнивая его с уравнением гармонических колебаний ax+ω2x=0 (см. § 13.3), можно сделать вывод, что математический маятник совершает гармонические колебания. А так как рассмотренные колебания маятника происходили под действием только внутренних сил, то это были свободные колебания маятника. Следовательно, свободные колебания математического маятника при малых отклонениях являются гармоническими.
Обозначим gl=ω2. Откуда ω=gl−−√ — циклическая частота колебаний маятника.
Период колебаний маятника T=2πω. Следовательно,
T=2πlg−−√
Это выражение называют формулой Гюйгенса. Оно определяет период свободных колебаний математического маятника. Из формулы следует, что при малых углах отклонения от положения равновесия период колебаний математического маятника: 1) не зависит от его массы и амплитуды колебаний; 2) пропорционален корню квадратному из длины маятника и обратно пропорционален корню квадратному из ускорения свободного падения. Это согласуется с экспериментальными законами малых колебаний математического маятника, которые были открыты Г. Галилеем.
Подчеркнем, что эту формулу можно использовать для расчета периода при одновременном выполнении двух условий: 1) колебания маятника должны быть малыми; 2) точка подвеса маятника должна покоиться или двигаться равномерно прямолинейно относительно инерциальной системы отсчета, в которой он находится.
Если точка подвеса математического маятника движется с ускорением a⃗ то при этом изменяется сила натяжения нити, что приводит к изменению и возвращающей силы, а следовательно, частоты и периода колебаний. Как показывают расчеты, период колебаний маятника в этом случае можно рассчитать по формуле
T=2πlg′−−√
где g′ — "эффективное" ускорение маятника в неинерциальной системе отсчета. Оно равно геометрической сумме ускорения свободного падения g⃗ и вектора, противоположного вектору a⃗ , т.е. его можно рассчитать по формуле
g⃗ ′=g +(−a ).
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. — Мн.: Адукацыя i выхаванне, 2004. — С. 374-376.
Сразу отметим некоторые ошибки этого анализа. Во-первых, не учитывается центробежная сила. Видимо, тот, кто писал эту статью в энциклопедии, по умолчанию предполагал, что центробежная сила либо не влияет на колебания математического маятника, либо она настолько мала, что её нет смысла принимать в расчет. Между тем это не так даже при условии, что угол отклонения маятника от вертикальной оси не превышает 5-10 градусов. А при большем отклонении центробежная сила резко возрастает. Во-вторых, автор статьи предполагает, а это отражено на рисунке 13.11, что при прохождении маятником самой нижней точки натяжение стержня или нити (Fупр) резко возрастает, хотя природу этого возрастания он не раскрывает, так как не привлекает к анализу центробежную силу.
В результате математический и даже физический анализ колебаний математического маятника вроде бы проведен правильно, получаются правильные формулы для вычисления частоты колебаний математического маятника при малых углах отклонения, но в целом назвать анализ полным нельзя, так как любой настоящий ученый просто обязан при таком анализе учитывать наличие всех факторов. И оценить влияние каждого из них на те или иные эффекты – период колебаний, натяжение стержня (нити), связь кинетической энергии с центробежной силой, влияние центробежной силы, если оно есть, на силу, заставляющую груз маятника возвращаться к точке устойчивого равновесия и т.д. Представим такой гипотетический пример, как расчет сил, действующих на самолет и летчика при выходе из пике. Если не учесть при этом центробежную силу, то войдя в пике, самолет с летчиком могут уже никогда не вернуться на аэродром.
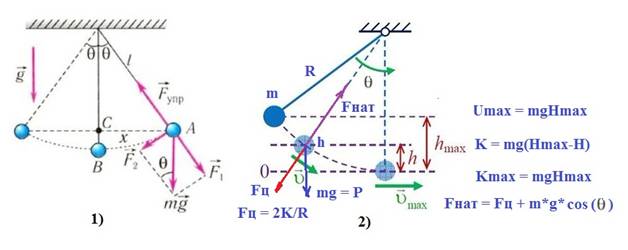
Рис.2. Некоторые закономерности математического маятника.
На рис.2, часть 1) неправильно отражены силы, действующие на груз и стержень маятника. На рис.2, в части 2) показано, как правильно рассчитывать силы, которые действуют на груз и стержень (нить) маятника при колебания. Если нам будет известно максимальное отклонение груза от вертикали, или максимальная высота подъема груза от точки равновесия, то кинетическую энергию в любой точке траектории можно рассчитать по простой формуле, а зная кинетическую энергию, можно легко вычислить центробежную силу, а зная центробежную силу и проекцию веса груза на линию, вдоль которой действует центробежная сила, всегда можно узнать натяжение стержня (нити).
Из этой схемы ясно, что центробежная сила, а также центростремительная сила на значение силы, возвращающей маятник к точке равновесия, не влияют. Этот параметр зависит только от веса груза и угла отклонения стержня маятника от вертикальной оси. Отсюда также следует, что центробежная сила не влияет на частоту колебания маятника. Это верно, скорее всего, если точка подвеса маятника неподвижна. Такие факты, видимо, дали основание некоторым академикам игнорировать центробежные силы при описании поведения математического маятника. Но если центробежные силы не влияют на период колебаний маятника, то на другие параметры от центробежной силы уже зависят. Отсюда следует, что учет этой силы важен при подборе нити или стержня, а также следует иметь в виду, что центробежная сила может быть использована как сила, создающая тягу, или способную генерировать энергию.
Например, такой маятник (рис.3) можно превратить в насос, качающий воздух.
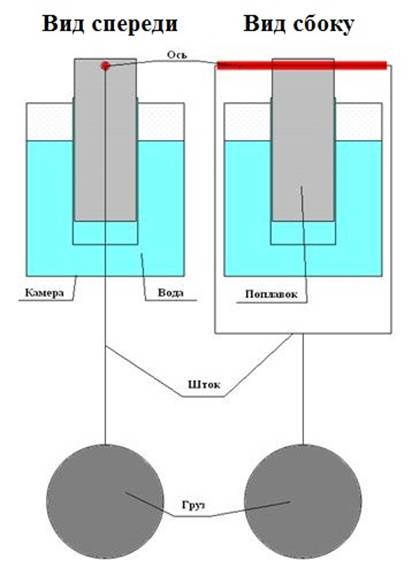
Рис.3. Маятник с поплаком-поршнем, который можно превратить в воздушный насос.
Для поддержания колебаний такого маятника много энергии не потребуется, но такой колеблющийся маятник будет воздействовать на поплавок-поршень с силой, которая будет зависеть от массы груза и угла отклонения от вертикальной оси. При максимальной отклонении маятник будет давить на поршень с наименьшей силой, меньше веса груза, а в самой нижней точке, которую он будет проходить с максимальной скоростью, маятник будет уже воздействовать суммой сил – весом груза и максимальной центробежной силой. Конечно, точка «подвеса» такого маятника будет уже периодически смещаться вверх-вниз, но этот факт на саму суть использования такого маятника в качестве генератора энергии не отражается. Такой маятник для своей раскачки и поддержания колебаний с заданной амплитудой потребует энергии меньше, чем будет вырабатывать её даже в качестве воздушного насоса. Такой маятник можно считать вариантом качалки Милковича, у которой коромысло имеет нулевую длину.
Раз уж мы подошли к рассмотрению таких маятников, у которых ось совершает вертикальные колебания, то нам следует рассмотреть такой маятник, как маятник Капицы-Стефенсона, информацию о котором можно узнать из Википедии. Одна из форм этого маятника приведена на рис.4.
Рис.4. Маятник Капицы-Стефенсона. Одна из конструкций этого маятника: мотор приводит кривошип, который через шатун и рычаг передаёт вибрацию на перевёрнутый маятник.
Приведем некоторые выписки из статьи из Википедии.
Обозначения

Схема маятника Капицы
Направим ось ![]() вертикально вверх, а ось
вертикально вверх, а ось ![]() горизонтально,
так чтобы плоское движение маятника происходило в плоскости (
горизонтально,
так чтобы плоское движение маятника происходило в плоскости (![]() —
— ![]() ). Введем обозначения:
). Введем обозначения:
·
![]() — частота вынуждающих вертикальных гармонических
колебаний подвеса,
— частота вынуждающих вертикальных гармонических
колебаний подвеса,
·
![]() — амплитуда вынуждающих колебаний,
— амплитуда вынуждающих колебаний,
·
![]() — собственная
частота колебаний математического маятника,
— собственная
частота колебаний математического маятника,
·
![]() — ускорение свободного падения,
— ускорение свободного падения,
·
![]() — длина легкого стержня,
— длина легкого стержня,
·
![]() — масса грузика.
— масса грузика.
Если угол между
стержнем и осью ![]() обозначить как
обозначить как ![]() , то зависимость координат грузика от времени запишется
следующими формулами:
, то зависимость координат грузика от времени запишется
следующими формулами:
![]()
Энергия маятника
Потенциальная энергия маятника в поле тяжести задается положением грузика по вертикали как
![]()
В кинетической энергии
помимо обычного слагаемого ![]() ,
описывающего движение математического маятника, имеются дополнительные
составляющие, вызванные вибрацией подвеса:
,
описывающего движение математического маятника, имеются дополнительные
составляющие, вызванные вибрацией подвеса:
![]()
Полная энергия дается
суммой кинетической и потенциальной энергий ![]() , а лагранжиан системы их разностью
, а лагранжиан системы их разностью ![]() .
.
Для математического
маятника полная энергия является сохраняющейся величиной, поэтому кинетическая
энергия ![]() и потенциальная энергия
и потенциальная энергия ![]() на
графике их зависимости от времени
на
графике их зависимости от времени ![]() симметричны
относительно горизонтальной прямой. Из теоремы вириала следует, что средняя
кинетическая и потенциальная энергии в гармоническом осцилляторе равны. Поэтому
горизонтальная прямая, относительно которой имеется симметрия
симметричны
относительно горизонтальной прямой. Из теоремы вириала следует, что средняя
кинетическая и потенциальная энергии в гармоническом осцилляторе равны. Поэтому
горизонтальная прямая, относительно которой имеется симметрия ![]() и
и ![]() , соответствует половине
полной энергии.
, соответствует половине
полной энергии.

Характерные зависимости потенциальной и кинетической энергий от времени для математического маятника
Если подвес колеблется,
то полная энергия больше не сохраняется. Кинетическая энергия является более
чувствительной к вынуждающим колебаниям, чем потенциальная. Потенциальная
энергия ![]() ограничена как сверху,
так и снизу
ограничена как сверху,
так и снизу ![]() , в то
время как кинетическая энергия ограничена только снизу
, в то
время как кинетическая энергия ограничена только снизу ![]() . При больших значениях частоты
. При больших значениях частоты ![]() , кинетическая энергия может быть много больше
потенциальной.
, кинетическая энергия может быть много больше
потенциальной.

Характерные зависимости потенциальной и кинетической энергий от времени для маятника Капицы
Уравнение движения
Движение маятника
удовлетворяет уравнениям Эйлера — Лагранжа. Зависимость фазы маятника ![]() от времени определяет положение грузика[5]:
от времени определяет положение грузика[5]:
![]()
Дифференциальное уравнение, описывающие эволюцию фазы маятника
![]()
нелинейно из-за
имеющегося в нем множителя ![]() . Наличие нелинейного
слагаемого может приводить к хаотическому поведению и появлению странных
аттракторов.
. Наличие нелинейного
слагаемого может приводить к хаотическому поведению и появлению странных
аттракторов.
Положения равновесия

Колебания маятника Капицы в глобальном (нижнем) минимуме.
Модель маятника
Капицы является более общей, чем модель математического маятника. Последняя
получается в предельном случае ![]() .
Фазовый портрет математического маятника хорошо известен. На координатной
плоскости это просто окружность
.
Фазовый портрет математического маятника хорошо известен. На координатной
плоскости это просто окружность ![]() . Если в начальный момент времени энергия маятника была
больше, чем максимум потенциальной энергии
. Если в начальный момент времени энергия маятника была
больше, чем максимум потенциальной энергии ![]() ,
то траектория будет замкнутой и циклической. Если же энергия маятника была
меньше
,
то траектория будет замкнутой и циклической. Если же энергия маятника была
меньше ![]() , то он будет совершать периодические колебания около
единственной устойчивой точки равновесия с наименьшим значением потенциальной
энергии
, то он будет совершать периодические колебания около
единственной устойчивой точки равновесия с наименьшим значением потенциальной
энергии ![]() . В случае
математического маятника полная энергии системы не меняется.
. В случае
математического маятника полная энергии системы не меняется.

Колебания маятника Капицы в в локальном (верхнем) минимуме.
В случае ![]() система более не является замкнутой и ее полная энергия
может изменяться. Если при этом, частота вынуждающих колебаний
система более не является замкнутой и ее полная энергия
может изменяться. Если при этом, частота вынуждающих колебаний ![]() много больше частоты собственных колебаний
много больше частоты собственных колебаний ![]() , то такой случай можно проанализировать
математически. Оказывается[1], что если ввести эффективный
потенциал, в котором движется маятник (медленно относительно частоты
, то такой случай можно проанализировать
математически. Оказывается[1], что если ввести эффективный
потенциал, в котором движется маятник (медленно относительно частоты ![]() ), то этот потенциал может иметь два локальных минимума —
один, как и раньше в нижней точке
), то этот потенциал может иметь два локальных минимума —
один, как и раньше в нижней точке ![]() ,
а другой в верхней точке
,
а другой в верхней точке ![]() . То есть точка
. То есть точка ![]() абсолютно неустойчивого равновесия для математического
маятника, может оказаться точкой устойчивого равновесия для маятника Капицы.
абсолютно неустойчивого равновесия для математического
маятника, может оказаться точкой устойчивого равновесия для маятника Капицы.
Фазовый портрет

Портрет системы в координатном пространстве для маятника Капицы при относительно небольшой амплитуде вынуждающих колебаний
Интересные фазовые
портреты могут быть получены для значений параметров, недоступных для
аналитического рассмотрения, например в случае большой амплитуды колебания
подвеса ![]() [6][7].
Если увеличить амплитуду вынуждающих колебаний до половины длины маятника
[6][7].
Если увеличить амплитуду вынуждающих колебаний до половины длины маятника ![]() , то получится картина аналогичная той, которая
изображена на рисунке.
, то получится картина аналогичная той, которая
изображена на рисунке.

Портрет системы в координатном пространстве для маятника Капицы при большой амплитуде вынуждающих колебаний
При дальнейшем
увеличении амплитуды ![]() (начиная от значения
(начиная от значения ![]() ), все внутреннее пространство начинает «замазываться»
полностью, то есть, если ранее не все внутренние точки координатного
пространства были доступны, то теперь система может побывать в любой точке.
Очевидно, что дальнейшее увеличение длины
), все внутреннее пространство начинает «замазываться»
полностью, то есть, если ранее не все внутренние точки координатного
пространства были доступны, то теперь система может побывать в любой точке.
Очевидно, что дальнейшее увеличение длины ![]() принципиально
более не изменит картину.
принципиально
более не изменит картину.
Интересные факты
· Как отмечал П. Л. Капица, маятниковые часы на вибрирующем основании всегда спешат.
· В коридоре института физических проблем стояла работающая модель маятника Капицы, и любой желающий мог воочию убедиться, как при ее включении маятник поднимался и оставался в вертикальном положении.
· Метод эффективного потенциала был разработан П. Л. Капицей во время работы над высокочастотным генератором «ниготроном», названным так по месту исследования у себя на даче на Николиной Горе. Для того чтобы не было проблем с «секретностью» при публикации метода, П. Л. Капица придумывает простую физическую модель, к которой был бы применим этот метод. Таким образом, появляются статьи[1] про маятник с вибрирующим подвесом.
· П. Л. Капица предлагал решить задачу в измененном варианте поступающим к нему в аспирантуру. Требовалась отыскать условие устойчивости акробата на доске, положенной на цилиндр, лежащий на боку. Ожидаемый ответ был, что если акробат начинал быстро переступать ногами, то его положение становилось устойчивым.
· При ходьбе устойчивость тела увеличивается в несколько раз по сравнению с устойчивостью при стоянии. Этот биомеханический феномен до настоящего времени не изучен. Существует гипотеза, которая объясняет устойчивость тела при ходьбе колебательными движениями центра голеностопного сустава. Тело человека представляется с позиции перевернутого маятника с центром в области голеностопных суставов, который приобретает устойчивость в вертикальном положении, если его центр совершает колебание вверх-вниз с достаточно высокой частотой (маятник Капицы).
Сразу можно сделать заключение, что в математической модели маятника Капицы не показаны центробежные силы, которые, конечно, не отражаются на потенциальной и кинетической энергии маятника в поле тяжести Земли, но они могут вынуждать груз маятника вести себя странным образом – подниматься вверх против силы тяжести. Конечно, чтобы маятник Капицы так себя повел, он должен быть направлен своим грузом вверх. А затем уже он сам, под действием вертикальных колебаний точки «крепления», а также некой «непонятной» силы занять почти вертикальное положение, при котором груз будет «смотреть» вверх. И этой «непонятной» силой является центробежная сила, которая уже проявляется в несколько необычной форме. Если у математического маятника центробежная сила детерминирована и ее легко вычислить для любой точки траектории, и она при этом всегда будет тянуть груз маятника вниз, то для маятника Капицы это уже не так очевидно. Груз этого маятника, особенно, если маятник будет в перевернутом состоянии, будет совершать сложные колебания, груз будет совершать основные более медленные перемещения в пространстве, создавая красивую «розетку», красивый объемный «цветок», на которую будет накладываться колебания более высокой частоты из-за колебаний точки «подвеса». Что-то подобное изображенному на рис. 5.
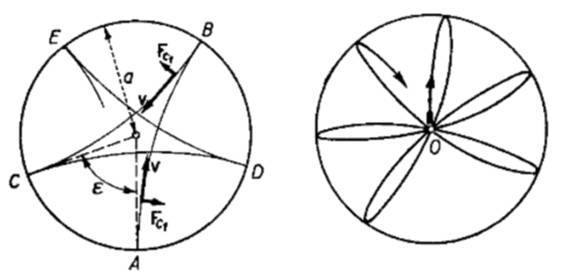
Рис.5. Возможно так движется груз маятника Капицы, когда он устанавливается в вертикальном положении.
Это всего лишь схема, сам рисунок взят из Интернета, как наиболее подходящий, чтобы показать, как ведет себя груз. Но при этом надо понимать, что точка «крепления» маятника Капицы совершает вертикальные колебания, поэтому этот «цветок» строится не на поверхности сферы, а в неком пространстве, ограниченном двумя сферами, положение которых определяется средним положением точки «крепления» маятника, а также амплитудой колебаний этой точки в вертикальном направлении. Кроме того, следует иметь в виду, что в том варианте, в котором Капица реализовал свою модель, точка «крепления» маятника кроме вертикальных колебаний совершает колебания и в горизонтальном направлении, что еще больше усложняет картину физических процессов в этом простом на вид приборе.
Но одно, несомненно, груз маятника Капицы описывает траекторию, которую условно можно разместить на некой сфере, радиус которой нам известен – это длина стержня маятника. А значит, груз будет перемещаться по траектории, которая в основном будет направлена выпуклостью вверх. И значит, при движении по таким траекториям на груз маятника Капица будет действовать динамическая центробежная сила, усредненный вектор которой будет направлен вверх. И именно эта сила будет совершать работу, поднимая груз маятника Капицы на максимально возможную высоту. Это и есть то самое динамическое потенциальное поле, которое накладываясь на гравитационное поле Земли, порождает так называемый эффективный потенциал. Только в математической модели, предложенной Капицей, этот эффективный потенциал рассчитывается слегка неправильно, реальная сила, которая тянет груз маятника Капицы вверх, скорее всего, больше, чем предсказывает теория Капицы. Да это сила инерции, но в математической модели Капицы учитывается только «линейная» инерция, тогда как центробежная инерция в модели не учитывается.
Маятник Капицы-Стефенсона – это сверх'единичное устройство, которое вырабатывает энергии больше, чем потребляется на поддержание вертикальных вибраций и преодоление потерь на трение при колебаниях маятника. Раз груз движется против сил гравитации, значит такое устройство вырабатыывает для этого необходимую энергию. Если мы покроем поверхность множеством мелких-мелких маятников Капицы и заставим их всех вибрировать, то такой ансамбль вполне может поднять вверх не только себя, но и какой-то груз, например человека. Так что сказки о коврах-самолетах, похоже, не ложь, а самая настоящая быль, просто технология создания таких ковров была потеряна в глубоком прошлом, возможно, из-за каких-то глобальных катастроф.
Вот почему часы с маятником на вибрирующем основании всегда спешат, а ходить человеку легче, чем стоять. Вибрация вибрацией, но и о центробежной силе не надо забывать. Мы из своего повседневного опыта прекрасно знаем, насколько опасными могут быть силы инерции даже при скоростях, не превышающих несколько десятков километров в час. А на такие скорости при малом радиусе разворота способен любой человек. В том слысле, что с такими скоростями, пусть и непродолжительное время любой человек может перемещать свои руки и ноги из одного положения в другое. И любой поворот вокруг любого сустава порождает центробежные силы, которыми наш организм пользуется с огромным эффектом, так как от рождения на это способен. А дополнительные тренировки позволяют человеку стать акробатом, гимнастом, борцом или хорошим бегуном.
У меня нет возможности проводить более детальный математический анализ маятника Капицы. Но многое некоторыми учеными уже сделано. И если дело ими доведено до создания компьютерных программ, то ничего не стоит эти программы уточнить, введя в них блоки, которые будут в дополнение к ранее расчитанным силам, вычислять для каждой точки траектори груза маятника Капицы центробежные силы, а далее уже не составит особого труда показать на объемном графике движение груза маятника Капицы во всей красе. И не только посмотреть, но и рассчитать тягу, которую будет создавать такой маятник или их совокупность. Так как центробежные силы обратно пропорциональны радиусу кривизны траектории, то чем короче будет такой маятник, тем более заметную тягу он будет создавать. А так как колебания такого маятника будет вынужденные, то центробежная сила будет пропорциональна (или соизмерима) квадрату частоты колебаний основания или точки «крепления». Так что есть над чем подумать.
/*/
После того, как стало ясно, что маятник Капицы-Стефенсона – это сверх'единичное устройство, следует обратиться к тому наследству, что оставил нам В.Н. Челомей. Речь идет не о балистических и крылатых ракетах, а о маятниках Челомея. Ракеты преходящи, а вот маятники Челомея – это наше будущее. Всё великое начинается с игрушек.
В этом 2013 году 30 июня генеральному конструктору авиационной техники, дважды Герою Социалистического Труда, академику Владимиру Николаевичу Челомею исполнилось бы 99 лет. Его имя менее известно широкой публике, чем имя Сергея Павловича Королева. Причину хорошо разъясняет поговорка, ходившая в кругах, приобщенных к ракетной тематике: «Королев работает на ТАСС, а Челомей - в унитаз». Или в переводе на разговорный язык: Королев работает на публичный космос, а Челомей - на оборону, его уровень секретности был выше уровня секретности Королева. Именно его дешевые, а потому и самые массовые межконтинентальные ракеты УР-100 шахтного базирования и их модернизации стали ракетным щитом страны. Но Челомей работал не только на войну. Если бы карта легла иначе, мы могли бы побывать и на Луне…
Владимир Николаевич Челомей родился 30 июня 1914 года в семье учителей народной школы губернского города Седльце (Siedlce) Привислинского края. В 1937 году окончил Киевский авиационный институт, где остался работать преподавателем. В 1941 году начал работать в Центральном институте авиационного моторостроения (ЦИАМ) в Москве. С 1944 года возглавлял Объединённое конструкторское бюро 52, ставшее сегодняшним «НПО Машиностроения» (г. Реутов Московской области). В 1952 стал профессором МГТУ им. Баумана, в 1962 году — академиком АН СССР. С 1974 года — депутат Верховного Совета СССР.
Академик Челомей участвовал в создании ряда двигателей и прочих важнейших объектов ракетной, космической и авиационной техники. Под его руководством были разработаны ракеты-носители («Протон» активно используется до сих пор), искусственные спутники Земли «Протон» и «Полёт», орбитальные станции серии «Алмаз», пилотируемый корабль ТКС и т. п. В. Н. Челомей являлся одним из ключевых создателей советского «ядерного щита». Основные труды по конструкции и динамике машин, теории колебаний, динамической устойчивости упругих систем, теории сервомеханизмов.
Дважды Герой Социалистического Труда (1959, 1963). Лауреат Ленинской премии (1959) и трёх Государственных премий (1967, 1974, 1982). В Москве на Лефортовской набережной установлен памятник В. Н. Челомею. В его честь названы улица в Москве, площадь и улица в Реутове. Имя Челомея носит астероид 8608, открытый Крымской обсерваторией. Учреждена медаль имени В. Н. Челомея. В 2003 году была выпущена почтовая марка Украины, посвящённая Челомею. Именем Челомея назван самолёт А-320 (бортовой номер VQ-BCN) авиакомпании «Аэрофлот». В г. Байконур установлен бюст В. Н. Челомея во дворе Международной космической школы имени академика В. Н. Челомея.
Но для меня важнее те чудеса, дверь к которым приоткрыл В.Н. Челомей. «Со студенческой скамьи колебания вошли в плоть и кровь Челомея», - сказал один из его коллег по академии наук. Он выбрал для себя универсальный инструмент познания мира в виде теории колебаний и пользовался этим инструментом весьма успешно, будь-то разработка, двигателей, крылатых или баллистических ракет, систем автоматического управления… И его выбор оказался верным, потому что все в мире колеблется от атомов до галактик. Мы живем в мире вибраций… Только замечаем это подчас поздно, когда происходит катастрофа. На языке колебаний это называется потерей динамической устойчивости.
Своими работами Владимир Ни¬колаевич открыл увлекательныи мир колебаний с явлениями параметрического резонанса. Экспериментами он наглядно показал, что мир такой «старой» науки, как механика, полон загадок и открытии, как и мир современной ядерной физики.
Последняя при жизни опубликованная его работа в «Докладах Академии наук СССР» так и называлась «Парадоксы в механике, вызываемые вибрациями». Он показал в экспериментах ряд вибрационных эффектов, которые «противоречили» закону гравитации. В сосуде с водой, помещенном на вибрирующую подставку деревянные шарики тонули, а металлические - плавали по поверхности. Или, например, неподвижный, свободно подвешенный маятник направлен, как известно, всегда грузом вниз, к центру Земли, а если раскачивается, то только около этого положения равновесия. Но если опора маятника вибрирует, то сразу же все меняется как по волшебству: маятник замирает в любом положении - и горизонтальном, и даже «вверх ногами».
Теорию этого сложного динамического явления Челомей описать не успел. Но на его основе в Томском политехническом университете удалось подойти вплотную к созданию физической модели левитирующего тела. Профессор Владимир Копытов, считает, что создание антигравитаторов на основе эффекта Челомея вполне возможно. Дело - за достаточно мощными преобразователями и различных видов энергии в кинетическую (на уровне 50 кВт). Тогда можно будет перейти к разработке принципиально новых наземных и воздушных транспортных средств.
Надо сказать, что найденные парадоксы не просто игра досужего ума. Эти вопросы корнями своими уходят в практику. Ведь ракета на активном участке, когда работают двигатели, сотрясается от вибраций, и эти вибрации передаются на такие приборы управления, как гироскопы, которые начинают «врать», И ракета сходит с курса.
Вибрационные парадоксы получили название принцип Челомея. Этот принцип взяли на вооружение политологи и обществоведы. В социальной редакции принципа Челомея звучит так: чтобы система была устойчивой, ее надо время от времени сильно «встряхивать». Наступивший кризис даст нам возможность посмотреть, справедливо ли расширение принципа Челомея на общественные процессы.
И сама творческая деятельность Челомея была своего рода парадоксальным явлением. С одной стороны, он крупный ученый, с другой - выдающийся инженер-конструктор. А такое сочетание несколько парадоксально. Дело в том, что характер научной деятельности значительно отличается от конструкторской. Ученый, как остроумно кто-то заметил, стремится увидеть целый лес, в то время как конструктор концентрирует свое внимание на одном дереве.
Обратимся к чудесам Чаломея. Им были обнаружены в экспериментах с вибрирующими жидкостями и твердыми телами новые парадоксальные явления динамической устойчивости неустойчивых состояний в статике. Нижеследующий материал взять из работы Широносова Валентина Георгиевича.
/*/
1. Устойчивое положение системы связанных “перевернутых” маятников с пульсирующей точкой подвеса (типа рис.6.1).
2. Тяжелый шар в вибрирующей жидкости. Цилиндрический сосуд (труба), выполненный для удобства наблюдения из прозрачного материала, заполняется жидкостью, например водой. Затем в этот сосуд помещается сплошной шар или цилиндрическое тело из материала с удельным весом, превышающим удельный вес жидкости.
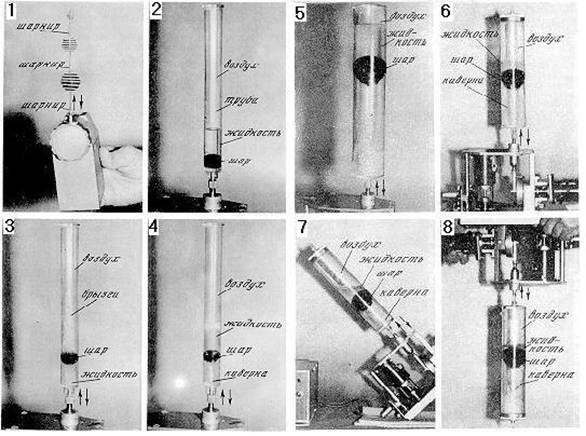
Рис. 6.1 - 6.8. “Маятники” Челомея
Шар тонет и занимает нижнее положение в сосуде (рис.6.2). После этого сосуд устанавливается на вибрационном стенде и подвергается вертикальным колебаниям вдоль его оси. При достижении определенной интенсивности колебаний шар в сосуде всплывает (рис.6.3). С увеличением интенсивности колебаний под шаром образуется воздушное пространство (каверна) с небольшим количеством жидкости, а остальная жидкость располагается над шаром (рис.6.4). При этом система находится в устойчивом динамическом состоянии. Небольшое давление воздуха, создаваемое под шаром, легко поднимает его вверх вместе с жидкостью (рис.6.5). При этом система устойчива и в этом новом положении. Устойчивое положение системы сохраняется и при переворачивании сосуда в вертикальной плоскости на 180о (рис.6.6 - 6.8). Подобный опыт можно осуществить с сосудом, в котором находятся несколько шаров (рис. 7.1, 7.2).
И в этом случае наблюдаются аналогичные явления: воздушные каверны образуются почти под каждым шаром с жидкостью над ними. Можно наблюдать обратное явление: цилиндрический предмет, легкий по сравнению с жидкостью, при вибрациях может тонуть (рис.7.3, 7.4). Во всех случаях система под действием вибраций стремится занять положение, близкое к состоянию с максимальной потенциальной энергией.
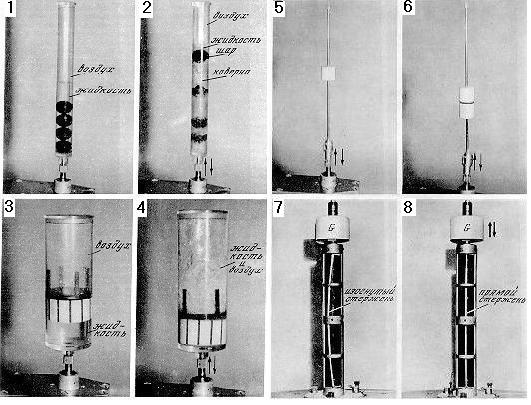
Рис. 7.1 - 7.8. “Маятники” Челомея
3. Незакрепленная шайба на вертикальном вибрирующем стержне с нижней шарнирной опорой. На прямой вертикальный стержень, имеющий одну шарнирную опору внизу, надета шайба с отверстием, диаметр которого несколько больше диаметра стержня. Под действием силы тяжести шайба падает. Однако, если придать шарнирной опоре этого стержня вертикальные колебания, шайба не падает, а остается почти в неподвижном положении на стержне, как бы в невесомости, стержень стоит почти вертикально (рис.7.5). Это объясняется действием усредненных вибрационных сил и моментов. Опыт легко обобщается на случай двух или более шайб (рис.7.6), а также на случай больших зазоров между стержнем и шайбой.
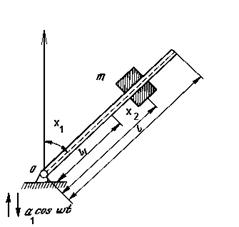
Рис.8. Маятник Челомея
Дифференциальные уравнения движения "перевернутого" маятника (стержня) с незакрепленной шайбой без зазоров при вибрирующей нижней точке опоры (рис.8) по мнению ученых имеют вид:
(I0+I1+mx22)x''1+2mx'1x'2+(k1/w
)x'1–(Мl 1+mх2)(g/w
2- acost )sinx1=0,
х''2 +
(k2 /w )х'2 –х2x'12 +
(g/w 2 – a cost )cos
x1 = 0, (4)
где Io - момент инерции стержня (без шайбы) относительно оси вращения; I1+mx22 – момент инерции шайбы; I1 – собственный момент инерции шайбы; m – масса шайбы; х2 – текущая координата шайбы, отсчитываемая вдоль стержня; x1 – текущий угол поворота стержня при колебаниях; l – длина стержня; М – масса стержня; l 1 – расстояние от центра массы стержня до его оси вращения; k1x1 – момент трения, создаваемый движением всей системы; k2х2 – сила трения шайбы о стержень, отнесенная к массе шайбы; w – круговая частота вибрации шарнирной опоры; а – амплитуда вибрации. Предполагается, что a/l <<1.
Эта сложная нелинейная система уравнений, описывающая движение рассматриваемой системы, до сих пор до "конца" не исследована и содержит члены с быстроменяющейся фазой. Методом усреднения исходная система дифференциальных уравнений сводится к четырем нелинейным дифференциальным уравнениям первого порядка, не содержащим время в явном виде. Решениями этих уравнений будут функции, медленно меняющиеся во времени.
В этом случае легко находятся квазистатические решения этих уравнений, дающие значения равновесных точек шайбы на стержне. Определение условий устойчивости шайбы относительно стержня также не представляет особых трудностей. Проверка теоретических результатов проводилась с помощью ЭЦВМ методом Кутта-Мерсона с автоматическим выбором шага интегрирования. Полученные результаты дают близкое совпадение с опытом.
4. Повышение устойчивости упругих систем при помощи вибраций. Прямолинейный вертикальный стержень нагружается грузом G, вес которого превосходит первую эйлерову (критическую) силу. Под действием этого груза стержень изгибается (рис.7.7). Грузу сообщают продольные вибрации с помощью вибровозбудителя, находящегося на нем. В этом случае стержень выпрямляется, и груз занимает высшее начальное положение (рис.7.8).
Таким образом стержень, подверженный периодическим высокочастотным продольным колебаниям, имеет критическую силу, превышающую статическую критическую эйлерову силу. Это можно в определенном смысле рассматривать как обобщение одной из самых известных теорем Эйлера об устойчивости упругих систем при их статическом нагружении.
/*/
В.Н. Челомей не успел довести работу со своими маятниками до конца. Судя по дифференциальным уравнениям, в них не учитываются центробежные силы. Возможно, последние слова в его жизни как раз были связаны с тем, он он, находясь на больничной койке, сумел разгадать эту тайну. Но этого мы, к сожалению, никогда не узнаем. Так что его загадки придется разгадывать нам. Со своей стороны я попытаюсь это сделать, а точнее предложить основы для тех, кто захочет этой теории посвятить свою жизнь, так как игра стоит свечь. Это чертовски интересная тема.
Прежде всего подумаем, почему металлические шары всплывали, а воздух тонул. Этот феномен указывает на то, что при выбрации в области металлического шара возникает инерционное (гравитационное) поле, градиент которого направлен против градиента гравитационного поля Земли. Но это локальное поле, аналог усреднения бесконечного множества векторов центробежных сил, каждый из которых можно представить в виде некой импульсной дельта-функции Дирака.
Т.е., в конкретной точке в конкретное время центиробежная сила есть, есть все данные, куда она направлена и каков её модуль. Но в другие моменты никакой центробежной силы там уже нет, так как она переместилась в другую точку траектории. Если проанализировать таким образом всю траекторию за большое количество циклов, то можно получить достаточно полную информацию, если не аналитически, то в виде набора данных, о итоговом инерционном поле, которое налагаясь на гравитационное поле Земли, порождает итоговое поле, в котором вибирирующие предметы ведут себя как-то странно.
А странно они ведут себя тогда, когда результирующее поле вместо придавливания металлических шаров вниз, толкает их вверх. В этом поле по закону Архимеда легкие тела с плотностью ниже плотности жидкости двигаются в сторону поверхности Земли. Но так как вибрация шара ограничена самим шаром и его ближайшими окресностями, то это результирующее аномальное гравитационное поле оказывалось строго локализованным. Поэтому воздух, как тело в котором вибрации возбудить сложно, опускаясь под шар, «прилипал» к нему. Вниз, в относительно спокойную воду, он опусться по закону Архимеда не мог, а вверх он подняться не мог, так как в этой зоне верх и низ поменялись местами.
Хотел бы подчеркнуть, что простой линейной инерции для проявления этого эффекта будет недостаточно. Нужна центробежная сила, которая, скорее всего, возникала потому, что под воздействием вибрации металлический шар совершал в горизонтальной плоскости движения по неким эквипотенциальным поверхностям, а так как любая волна слегка сферична, то шар вынужден был «кататься» по выпуклой поверхности, а значит в этом случае формирование центробежной силы становится неизбежным. И чем выше была частота вибраций (до известного предела), тем величина центробежной силы была больше, а значит тем отчетливее проявлялись чудеса Чаломея.
Если всё это так, то все маятники Чаломея, будучи «родственниками» маятнику Капицы-Стефенсона, могут при соблюдении некоторых условий превратиться в сверх'единичные устройства. Роботы в этом направлении еще не проводились, так что смелым и любознательным здесь открываются огромные перспективы.
/*/
Раз уж зашла речь о влиянии колебаний на поведение тел в гравитационном поле, то имеет смысл вспомнить, что впервые в истории о важности вибраций для людей и природы заговорил Джон Кили (рис.9)
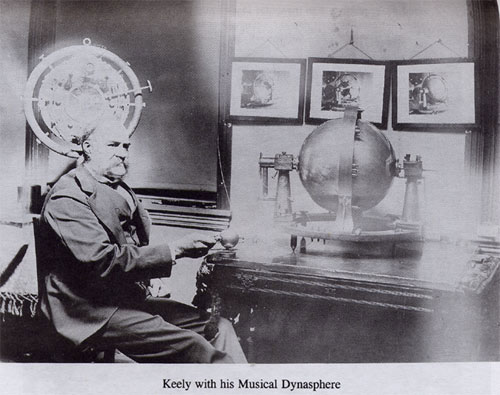
Рис.9. Джон Кили.
Его обвиняют в шарлатанстве, что он двадцать лет морочил людям и акционерам своей компании головы, показывая им фокусы, для проведения которых он использовал сжатый воздух. Самое интересно заключалось в том, что в руках Кили его приборы всегда работали, а вот другие повторить то же самое уже не могли, даже если Кили был рядом и подсказывал, что надо делать. Но когда Кили касался руками человека, то человек обретал способность приводить в действия аппараты Кили. Видимо, дело было в том, что Кили обладал способностью ощущать вибрации в более широком диапазоне, чем другие люди, а также в некоторых случаях сам мог генерировать колебания нужной ему частоты. А то, что он для своих опытов и представлений использовал воздух, указывает только на то, что сжатый воздух ему нужен был для создания слабых управляющих воздействия.
Именно Джон Кили первым в мире среди изобретателей добился того, что под действием вибраций металлические шары всплывали и находились в таком состоянии до тех пор, пока звучала мелодия определенной частоты.
Ещё в XVII веке Рене Декарт выдвинул идею о существовании некоего вещества, которое окружает нас и служит средой для возникновения волн и колебаний. Это вещество он назвал эфиром и предположил, что именно по нему передвигается свет (позже эфир получил эпитет «светоносный»). Впоследствии на версию Декарта опирались при разработке теории электромагнитных волн. Декарт заблуждался вполне логично для своего времени. Он не признавал атомизм (и даже написал труд «О невозможности существования атомов»), но при этом понимал необходимость заполнить Вселенную неким веществом, не допускающим пустот.
Теория эфира стала основополагающей, даже Исаак Ньютон утверждал, что свет переносится посредством эфира. Сомневаться в существовании эфира начал Майкл Фа радей (в первой половине XIX века), а окончательно теорию Декарта разбил Эйнштейн в 1905 году. Хотя в последнее время накопилось множество факторов, показывающих, что Эйнштей и его последователи во многом неправы
Джон Кили был тем изобретателем, который создавал свои устройства, опираясь на теорию Эфира, которую он дополнил множеством важных положений. В 1872 году тридцатипятилетний Кили пригласил в собственную частную лабораторию, расположенную в Филадельфии, учёных и представителей прессы для демонстрации своего сенсационного изобретения. Машина выглядела странно (рис.10) и представляла собой сложную систему «сыгранных» камертонов, способных, по утверждению создателя, резонировать с эфирными волнами и накапливать таким образом энергию. Идея была принята, пресса прорекламировала Keely Motor Company, инвестиции хлынули как из ведра.

Рис.10. Первый аппарат Кили.
10 ноября 1874 года Кили продемонстрировал, что деньги ему давали не зря. Демонстрация для прессы выглядела следующим образом. Непонятное устройство, стоявшее на столе Кили, имело сверху нечто вроде помеси форсунки и воронки. Кили некоторое время дул в него, а затем вылил туда порядка 18 литров воды. Через некоторое время манометр показал давление в 680 атмосфер, и Кили объявил, что вода дезинтегрировалась, а в генератор поступил так называемый «эфирный пар», способный приводить в действие любые механизмы. В доказательство Кили запустил находившийся тут же небольшой «вечный двигатель».
То, что происходило с 1874 по 1898 год никакому логическому объяснению просто не поддаётся. В среднем раз в полгода Кили представлял публике новую усовершенствованную машину, каждый раз он сыпал огромным количеством общепринятых и самостоятельно разработанных терминов, и каждый раз демонстрация проходила успешно. Изначально двигатель Кили носил название «гидропневматическая пульсационно-вакуумная машина», затем «вибрационный генератор», затем «симпатический негативный трансмиттер», потом ещё как-то, но общее название сохранялось — все эти устройства были «либераторами», или «дезинтеграторами», высвобождающими энергию эфирного пара из воздуха и воды. Кили, не стеснённый в средствах, строил либератор за либератором, причем самая крупная модель заняла огромный демонстрационный зал в его разросшейся лаборатории и весила 22 тонны, а самая маленькая была размером с карманные часы. Детали для либераторов заказывались на заводах по всей стране. Интересно, что Кили ни разу так и не запатентовал ни одного дезинтегратора целиком - лишь их составные части.
Рис.11. Вечный двигатель Кили.
Дезинтегратор состоял из перестраиваемого резонатора, внутренности которого Кили держал в секрете, системы камертонов, воронки для воды и приёмного устройства для звука. На демонстрациях изобретатель шумел в «микрофон», заливал воду в воронку, камертоны вибрировали, внутри резонатора что-то происходило, и подсоединённый к нему электродвигатель начинал работать. Кили очень туманно объяснял принципы действия своих разработок, то проводя параллели с органными трубами, то сыпля самонзобретёнными терминами. Всего за двадцать лет он построил 124 либератора и несколько сотен других машин, опосредованно связанных со звуком и мировым эфиром. Известны описания его «вибрационного микроскопа» с гигантской степенью увеличения, превосходящей все аналоги в сотни раз, «виброфона», который собирал любые звуки и преобразовывал их в эфирную энсрпио, раскладывая по тонам и высотам.
В 1884 году Кили продемонстрировал эфирную пушку, которая при немалом скоплении народа бесшумно выстрелила на 270 метров 140-граммовым ядрышком. Известной демонстрацией был показ 1886 года, когда Кили, залив в либератор всего 0,47 литра воды, добился давления в 183 атмосферы. В 1890-е Кили больше внимания стал уделять энергии, извлекаемой из чистых вибраций. без всякого эфирного пара. Последним его шоу (1897 год) стал вибрационный двигатель, имевший мощность 10 лошадиных сил при массе 91 килограмм.
Все эти годы Кили работал как проклятый. Каждые полгода он в обязательном порядке проводил презентации новых разработок, показывал свои вечные двигатели и энергию будущего и каждый раз привлекал новых инвесторов. Знаменитая филантропка Клара Джессап Мур вложила в Кили 100 тысяч долларов (2,5 миллиона по сегодняшним временам) плюс положила ему ежемесячную зарплату в 250 долларов (по нынешним меркам - 5400). Она была спонсором изобретателя с 1881 по 1890 год Вслед за ней Кили платил Джон Джекоб Астор IV, американский бизнесмен, путешественник и писатель.
В 1898 году Джон Кили умер от воспаления лёгких. Вот тут-то и началось журналистское расследование. Дело в том, что за двадцать четыре года Кили ни разу не провёл ни одной демонстрации вне своей лаборатории и не представил нигде, кроме замкнутых помещений, ни одного рабочего образца. Представители газеты Philadelphia Press, воспользовавшись разрешением супруги Кили, которая, забрав наследство, спокойно уехала из города, в январе 1899 года получили допуск в лабораторию. В составе комиссии был ряд инженеров и физиков.
В стенах лаборатории обнаружили встроенные трубки, ведущие куда-то в подпол, а там, двумя этажами ниже, огромную трёхтонную сферу для сжатого воздуха Все двигатели Кили работали именно на пневматике, причём он подводил воздух через десятки каналов, пронизывавших всё здание. Через неделю после публикации разоблачающих материалов, 25 января 1899 года, новый президент Keely Motor Company мистер Лкерман опроверг статью, объясняя, что трубки и сфера имели отношение к одному из давних опытов господина Кили, имевшему место в 1887 году, но ему уже никто не верил.
После демонстрации Кили обычно разбирал свои устройства, никогда не открывал их внутреннего содержимого, просил не фотографировать во время показов, — и ни один из сохранившихся лнбераторов так и не смогли заставить работать после смерти их создателя. Тем не менее нельзя не отдать должное техническому гению Джона Уоррела Кили. В конце концов, он спроектировал сложнейшую пневмосистему, синхронизировал её работу со своими опытами и манометрами, которые, как казалось, были подключены к «либераторам», а вовсе не к каким-то подпольным механизмам, и более двадцати лет обманывал огромное количество неглупых людей. Уникальный дом Кили снесли в 1920-е, сегодня на его месте - паркинг.
С наследием Джона Кили, видимо, придется разбираться еще долго, особенно с учетом важного значения центробежных силы, которые возникают при колебаниях твердых и газообразных тел. Ведь согласно математической зависимости между центробежной силой, кинетической энергией и радиусом кривизны траектории тела, следует, что чем меньше радиус кривизны, с одной стороны, и чем больше кинетическая энергия, с другой стороны, тем большей величины создается центробежная сила. Изменяя кинетическую энергию тела с помощью вибрации и радиус кривизны траектории тела, можно, тратя немного энергии, заставлять тело совершать полезную работу.
Думаю, что сжатый воздух для Кили играл исключительно вспомогательную роль, чтобы с его помощью заставить воду, шары и приборы совершать полезную работу, величина которой была уже гораздо значительней затрат энергии, которая использовалсь для управления пневматикой. Если бы Кили показал с самого начала, что он использует воздух для инициации своих приборов, то ему бы не дали проработать и недели, объявив шарлатаном и фокусником.
Да и сам Кили жил в такое время, когда наука не смогла бы понять его теорий. Собака или кошка видят и слышат совершенно по другому, чем человек. Человек это знает и умело использует этих животных для своих целей. Кили тоже, скорее всего, был уникальным человеком, который видел и слышал в других диапазонах, недоступных другим людям. Поэтому для него его опыты были естественными, а для других – настоящим чудом. Не исключено, что Джон Кили был очередным посланником Богов, которому было доверено довести до людей очередную частицу знаний.
И как всегда, люди не приняли пророка, а посчитали его шарлатаном. Ничего удивительного, так нам проще жить. Все, что нам непонятно, называем чудесами, а людей, которые эти чудеса умудряются воспроизвести, называем шарлатанами. Вот так и живем.
/*/
Уделив внимание маятнику Капицы-Стефенсона и маятникам Челомея, следует по иному посмотреть на изобретения перуанца Фернандо Рамоса Сиксто Солано, который создал Систему по умножению силы - Force Multiplier System (рис.12).

Рис.12. Система умножения мощности
Fernando
Sixto Ramos Solano: Force Multiplier System
http://x-faq.ru/index.php?topic=1961.0
Это устройство получило бронзовую медаль на Женевской международной выставке изобретений в Ginebra-Suiza 18-22 апреля 2012 года, однако, официальный список наград Женевы-2012 не содержит упоминания о Фернандо... Внимательный осмотр того, что официально выдается за изобретение Фернандо Солано, не дает ответа на то, как в его аппарате происходит умножение силы (рис.13).

Рис.13 Усилитель силы Fernando Sixto Ramos Solano.
С виду это что-то напоминающее редуктор, в котором пара маховиков вращается в одну сторону, а другая – в другую сторону. Обращает на себя внимание, что деталь, похожая на коромысло, синхронизирующая вращение пар маховиков (валов), ведет себя несколько странно, края её попеременно, то поднимаются, то опускаются. Но ясно, что такое устройство служить усилителем силы или мощности не может. Это важная, но все же основа более сложного устройства. Но она нуждается в изюминке, которая превратит устройство в усилитель.
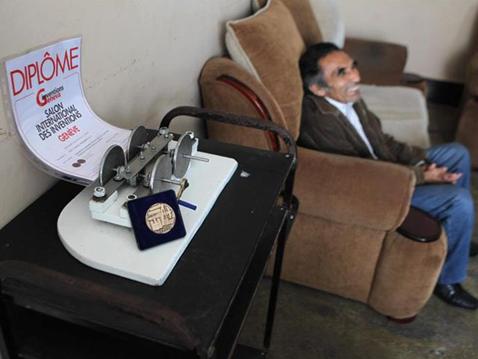
Рис.14. Фернандо Сиксто Рамос рядом со своим изобретением и женевской наградой.
Действительно, перуанский изобретатель Фернандо Рамос Сиксто Солано изобрел машину, которая может умножать мощность. Например, двигатель в 1 л.с. может запустить генератор или двигатель в 30 л. с. Установка, по мнению самого изобретателя, использует силы инерции (но какие) в качестве основного механизма для умножения силы.
Инерция возрастает в квадрате функции вращения. Видимо здесь имеется в виду, что коэффициент увеличения мощности пропорционален квадрату частоты вращения валов его устройства. На этот факт прошу обратить внимание.
Принцип работы его устройства понятен по рисунку рис.15. Это устройство можно считать модификацией маятника Капицы, который под руководством Фернандо научился вырабатывать энергию. Без дополнительного груза на вертикальном стержне это устройство вырабатывать дополнительную энергию не будет.
Отличие от классического маятника Капицы состоит в том, что настоящий маятник Капицы может вращаться вокруг «точки подвеса», а в устройстве Фернандо «нижний» конец маятника Капицы закреплен жестко, хотя может вращаться вокруг вала.
Рис.15. Схема работы устройство Фернандо Сиксто Солано.
На рис.16. показано, как будет двигаться груз при вращении валов в устройстве Фернандо Сиксто Рамоса Солано. Очень важно, что валы вращаются в разные стороны. Пока мы видим, что груз перемещается по траектории, напоминающей некий овал. А это значит, что и тут без центробежной силы не обходится.
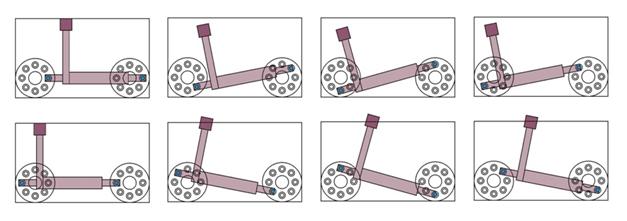
Рис.16. Движение груза по кадрам.
Но нам необходима более точная информация о том, по какой траектории перемещается груз, чтобы хотя бы в первом приближении оценить влияние центробежных сил на увеличение крутящего момента на левом валу в ответ на вращения с определенной мощностью на правом валу. Такую информацию удалось найти на одном иностранном форуме (рис.17).
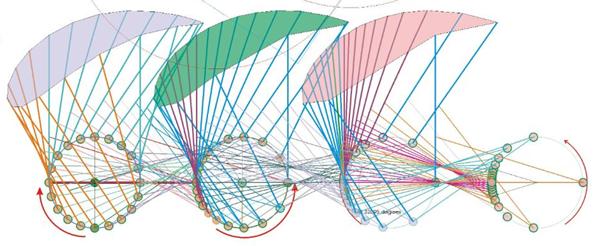
Рис.17. Форма траектории груза в устройстве Фернандо Сиксто Рамоса Солано.
Траектория явно напоминает сечение крыла дозвукового самолета. Верхняя часть траектории более выпукла, чем нижняя. А это значит, что с одной стороны правого вала всегда будет действовать сила, больше, чем с другой стороны. Разность сил может достигать больших величин.
Значит именно центробежные силы, возникающие при вращении груза по траектории, напоминающей сечение крыла самолета, и есть тот источник дополнительной мощности, который и позволяет назвать устройство Фернандо Сиксто Рамоса Солано усилителем мощности. И в этом нет никакого нарушения закона сохранение энергии, ибо за формирования дополнительной энергии отвечает совершенно не тот механизм, который обеспечивает вращение валов устройства.
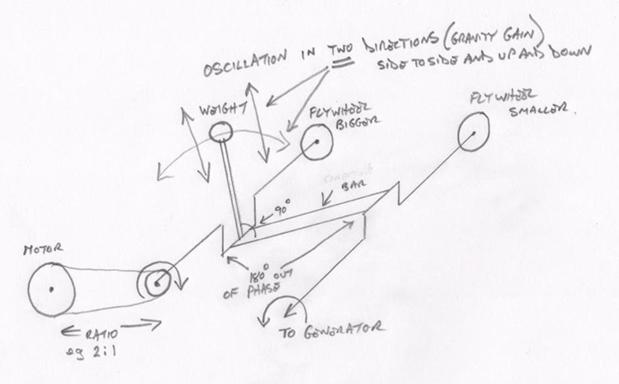
Рис.18. Схема, поясняющая работу умножителя силы Фернандо Сиксто Рамоса Солано.
На рис.18. показан механизм усиления силы на левом валу по отношению к правому валу. Тот, кто составлял это рисунок, похоже, понимал, что дополнительные силы создаются за счет центробежной силы. Конечно, это только схема.
Чтобы оценить красоту и мощь данного изобретения потребуется не один год напряженной работы физиков, инженеров и изобретателей. Но первый шаг сделан – маятник Капицы-Стефенсона превратился в генератор энергии.
Один из вариантов усилителя мощности Фернандо можно посмотреть по следующему адресу. И, похоже, усилитель сил Фернандо Сиксто Рамоса Солано будет работать не только на Земле, но и в невесомости, так как в невесомости центробежные силы формируются не сложнее, чем на Земле.
/*/
С помощью вибрации можно заставить «подниматься» против силы тяжести не только металлические шары. Наша авиации была бы немыслима без подъёмной силы. И самое простое объяснение природы подъемной силы заключается в том, что крыло, имея в сечении специфическую форму, заставляет воздушный поток делиться на две части (рис.19).
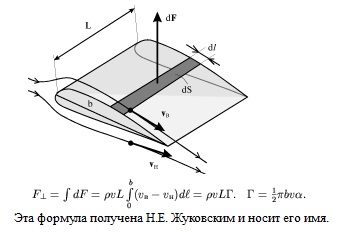
Рис.19. Механизм формирования подъемной силы по Жуковскому.
Нижняя часть потока проходит меньший путь под крылом с меньшей скоростью, тогда как верхняя часть потока проходит за тоже время больший путь, а значит, движется с бОльшей скорость. Это приводит по закону Бернулли к тому, что давление воздуха ниже крыла выше давления воздуха на верхней части крыла, поэтому благодаря разности давлений под крылом и над ним возникает значительная подъемная сила, в десятки раз больше силы лобового сопротивления крыла.
Между тем даже сам Жуковский прекрасно знал, что в его формулу для циркуляции необходимо вводить поправочный коэффициент, который зависел от формы сечения крыла. Это указывает на то, что формула Жуковского для вычисления подъемной силы нуждается в коррекции посредством учета некоторых факторов, на которые раньше не обращали внимание. И таким фактором может быть опять-таки центробежная сила.
Дело в том, что воздушная струя, огибая крыло, двигается по верху крыла по выпуклой искривленной траектории. А там, где есть искривление траектории, неизбежно формируется центробежная сила. Эта центробежная сила будет стремиться оторвать воздушный поток от поверхности крыла, чему в свою очередь будет активно мешать окружающий спокойный воздух. Поэтому воздушная струя, огибая крыло сверху, будет подниматься вверх, но одновременно окружающий воздух, давя снизу на крыло, будет перемещать вверх крыло, чтобы не допустить появления вакуума между воздушным потоком и верхней поверхность крыла. Это более или менее спокойно происходит только в неком диапазоне угла атаки крыла. При выходе угла атаки за определённые пределы воздух начинает отрываться центробежными силами от поверхности крыла, возникают зоны с вакуумом, что ведет к резкому уменьшению подъемной силы. Таким образом, скорее всего, подъёмная сила крыла является результатом проявления двух факторов – закона Бернулли и центробежных сил, которые возникают из-за искривления воздушных потоков под и над крылом.
Этот факт позволяет надеяться, что подъемную силу, как силу строго локальную,
которую нельзя оторвать от крыла, можно использовать в качестве «безопорной»
силы. Впервые о такой возможности высказался Инженер М. ЖАРКОВ, он
сообщил редакции журнала "Техника-молодежи",
1969 г №4, с.28-31. об опытах с тремя моделями. Но нам пока
достаточно остановиться на его опыте с крылом.

Рис.20. Опыт Жаркова с крылом.
В этом опыте для получения тяги использовалась подъемная сила крыла, обтекаемого потоком жидкости в закрытом сосуде. Система состояла из электромотора, полого цилиндра и неподвижного штока, на котором закреплено «крыло» (рис. 20). Цилиндр заполняется водой и приводится во вращение. За счет трения о стенку цилиндра жидкость увлекается в круговое движение.
«Тяговое усилие, развиваемое системой, — писал автор, — равно расчетной подъемной силе крыла и направлено по оси штока. При экспериментах величина этой свободной внутренней силы проверялась, на весах». (Согласно классической механике жидкость, отброшенная «крылом», должна удариться о дно цилиндра и вызвать уравновешивающую силу.)
То, что сделал Жарков, по настоящему не повторил никто, хотя о возможности использования подъемной силы крыла или вращающегося цилиндра в качестве «безопорной» силы не раз высказывался в своих книгах Александр Фролов. В основном авторы предлагают вращать поток при неподвижном крыле, но, похоже, лучше и проще все-таки вращать крыло, а еще лучше, сразу несколько крыльев, что, возможно, позволит увеличить тягу в несколько раз.
Если опыты М. Жаркова подтвердятся, а это, скорее всего, будет именно так, то в распоряжении людей появится простой и удобный механизм для создания разного рода «гравитационных» движителей и двигателей. Хотелось бы еще при жизни увидеть вертолет, у которого большие по длине лопасти будут спрятаны в небольшой цилиндр, заполненный жидкостью и вращение этих лопастей будет создавать тягу во много раз большую, чем это делают обычные лопасти.
/*/
В этой статье я попытался по иному взглянуть на широко известные научному сообществу устройства – маятник Капицы-Стефенсона, маятник Челомея, вибрационные технологии Джона Кили, усилитель силы Фернандо Сиксто Рамоса Солано и подъемную силу крыла. Сделан первый шаг в изучении влияния центробежной силы на поведение этих простых устройств. Получены предварительные выводы, что учет центробежных сил превращает маятник Капицы-Стефенсона или маятники Челомея в самые настоящие движители и генераторы энергии.
Думаю, что более детальный анализ влияния центробежных сил на свойства простых и сложных маятников, позволит получить еще много интересной информации, которая заставит нас по- иному взглянуть на окружающий мир. Маятник верно служил людям в течение многих сотен, а может и тысяч лет. Свойства его таковы, что он находит применение в самых неожиданных местах. Например, в мотоциклах его используют для улучшения сцепления заднего колеса с полотном дороги. Милкович превратил маятник в генератор энергии. А современной молодежи, видимо, удастся превратить маятник в движитель для летательных аппаратов. Возможно аналоги маятника, такие как маховики с дебалансами, сделают возможными космические перелеты.
Так что, похоже, мир изменяется, и он уже никогда не будет прежним. Вначале я решил, что революция в механике началась с появления «вечного двигателя» Андрея Ермолы. Но, когда внимательно присмотрелся к центробежной силе, то оказалось, что революция в механике совершена очень давно, просто официальная наука упорно не хочет всего этого замечать, предпочитая тренировать мозги молодых ученых на химерах ОТО и СТО.
Думаю, что серия статей, посвященных революции в механике, а заодно и в физике, этой статьей не закончится. И мне придется в очередной статье обратить внимание на гравитационные колеса, но уже в свете вновь открывшихся обстоятельств, что центробежные силы придают хорошо известным конструкциям совершенно новые свойства.
01.05.2013