Способ движения и устройство типа «Рыба»
Юрий Евгеньевич Устюгин
http://www.turbulence.ru/isobr01_1.html
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Предлагаемое техническое решение служит созданию транспортных средств, автономно перемещающихся в текучих средах.
УРОВЕНЬ ТЕХНИКИ
Известно (National Maritime Research Institute, http://www.nmri.go.jp /index e.html, Prototype Fish Robot, PF-600. http://www.nmri.go.jp/eng/ khirata/fish/experiment/pf600/pf600e.htm) устройство рыба-робот, состоящая из заоваленного в передней части жесткого цилиндрического туловища, несущего источник питания, радиоэлектронную схему управления двумя двигателями, осуществляющими колебательные движения хвоста, имеющего форму хвоста тунца, в соответствии с алгоритмом движения натурального тунца, воспроизводимым с помощью компьютера.
При наблюдении с помощью видеозаписи движения такой рыбы-робота легко убедиться в том, то устройство осуществляет свое движение аналогично движению венецианской гондолы под управлением гондольера, осуществляющего движения веслом, закрепленным на корме гондолы. По сути, несмотря на применение компьютера для управления движением робота, по-прежнему используется гребковый способ движения, что является принципиально низкоэффективным способом по сравнению со способом движения рыбы.
Известно (Л.С. Шапиро. К патентам природы. http://www.submarina.ru/intro.php?31), «что в 1936 г. английский зоолог Джеймс Грей установил, что сопротивление дельфина при его движении в воде, рассчитанное обычным для судостроения способом, оказывается в 8 - 10 раз больше того, которое способна преодолевать мускулатура животного. Высказывалось мнение, что для значительного уменьшения сопротивления кожа дельфина должна не пассивно, а активно демпфировать возмущения в пограничном слое, для чего существует какой-то физиологический процесс, способный управлять изменениями свойств кожи. Но, несмотря на подобные взгляды, моделирование активного действия, характерного для кожного покрова морских животных, продолжает рассматриваться как одна из перспективных проблем кораблестроения».
Таким образом, остается открытым вопрос: каким образом рыбы при своем движении снижают сопротивление среды?
Известны (Г. Шлихтинг. Теория пограничного слоя. Изд-во «Наука». М., 1974, с. - 712) средства снижения сопротивления тела в потоке в виде ламинаризации этих потоков и устранения отрыва пограничного слоя от обтекаемой поверхности с помощью отсоса пограничного слоя или вдувания в пограничный слой дополнительного количества текучего вещества, что приводит к повышению критического числа Рейнольдса и, следовательно, к подавлению процесса турбулизации пограничного слоя, увеличивающего сопротивление среды движению в ней тела.
И в том и другом случае требуются дополнительные средства для управления пограничным слоем на поверхности обтекаемого тела с фиксированным профилем.
Известны (№ 2002669 RU) способ и устройство для управления развитием пограничного слоя на обтекаемой поверхности, в котором определяют местоположение области перехода ламинарного пограничного слоя в турбулентный, измеряют его характеристики по всей длине и вводят в пограничный слой возмущения определенной амплитуды и фазы, добиваясь тем самым подавления развивающихся в ламинарном пограничном слое естественных возмущений, и как бы затягивают таким образом возникновение турбулентности, что приводит к уменьшению общего сопротивления.
Такое техническое решение требует использования большого количества датчиков, сложных электронных устройств (генератора, анализатор и т.д.) и соответственно значительных энергетических затрат (патент № 2171205 RU).
Известен (М.М. Ильин, К.С. Колесников, Ю.С. Саратов. Теория колебаний. Изд. МГТУ им. Н.Э. Баумана. М., 2003, с - 272) способ стабилизации перевёрнутого маятника, так называемого маятника П.Л. Капицы. Этот способ демонстрирует наличие устойчивого состояния равновесия у массивного тела с центром тяжести, расположенным выше точки подвеса, причем в точке подвеса тело подвергается высокочастотным малоамплитудным колебаниям. Этим фиксируется положение тела вдоль вертикали, поскольку принудительное отклонение до некоторого предельного угла маятника от положения равновесия приводит к свободным затухающим колебаниям маятника, завершающимся стабильным положением перевернутого маятника.
В настоящее время такой маятник и его многозвенные варианты является предметом многочисленных исследований, не имея практического приложения, кроме демонстрационных и объяснения устойчивости каната у «индийских факиров».
Известны (В.Г. Широносов. Резонанс в физике, химии и биологии. Ижевск. Издательский дом "Удмуртский университет", 2000/01. 92 с.) устройства типа перевернутого маятника, созданные В.Н. Челомеем. Отличительной особенностью этих маятников является то, что их поведение рассматривается в вибрирующей жидкой среде. При этом оказывалось, что, например, груз, свободный или надетый на стержень с возможностью инерционного соскальзывания с него, в случае вертикальной вибрации сосуда с вертикально или под некоторым углом к вертикали закрепленным внутри стержнем поднимается по стержню или без него вверх, если его плотность выше плотности жидкости, и опускается вниз, если плотность груза меньше плотности жидкости. Это явление демонстрирует различное поведение перевёрнутого маятника в случае изменения плотности среды.
Опыты Челомея до сих пор по прошествии уже 50 лет не нашли применения.
Известны (патент № 2259302 RU) наши «Способ и устройство для перемещения затопленного тела», заключающиеся в том, что, ударного типа воздействие в определенной точке захвата на обтекаемое гибкое крылоподобное тело в поперечном к крыловой поверхности направлении приводит к возникновению силы тяги, принуждающей тело к движению в направлении вперед поперек прилагаемого усилия. При этом гибкое тело естественным образом приобретает такую форму, при которой лобовое сопротивление тела минимальное.
Это техническое решение допускает расширение в виде его применения к системе последовательно соединенных подобных элементов, например, двух - «туловища» и «хвоста», воспроизводящими тело «рыбы» и процесс ее движения.
Цель предлагаемого решения - разработка способа и устройства движения в текучих средах, лишенного вышеперечисленных недостатков известных технических решений и являющегося естественным развитием нашего известного технического решения.
Цель достигается применением рыбоподобного тела, перемещающегося в текучей среде, составленного из двух последовательно соединенных обтекаемых гибких элементов массивного "туловища» и "хвоста", причем движение тела осуществляется за счет силы тяги, создаваемой «хвостом» и «туловищем» при их одновременном поперечном в противофазе ударного типа воздействии на окружающую текучую среду, при этом изгибные ударного типа движения туловища и хвоста способствуют снижению сопротивления среды за счет естественного принятия «туловищем» и «хвостом» формы в виде крыла в индуцированном встречном потоке обтекающей среды, а сопутствующие изгибным движениям деформации сжатия и растяжения боковых поверхностей «туловища» приводят соответственно к вливанию и отсосу жидкости в областях соответствующих пограничных слоев «туловища», что способствует снижению сопротивления за счет ламинаризации этих слоев, а продольные колебательные движения туловища, сопровождающие изгибные движения «туловища» и «хвоста», способствуют стабилизации направления движения «рыбы» и возникновению дополнительной тяги.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Исходные положения изобретения заключаются в следующем:
1) Основа движения рыбы - это изгибные ударного типа движения её туловища.
2) Эти изгибно-ударные движения улучшают гидродинамические характеристики обтекания туловища потоками настолько, что, даже потеряв хвост, рыбы могут совершать движение в среде, поскольку такие движения способствуют не только возникновению силы тяги, но и существенным образом снижают сопротивление среды.
3) В создании силы тяги у рыбы участвуют туловище, совершающее изгибно-ударные движения в среде, и хвост, достаточно жестко связанный с предхвостовым окончанием туловища, а потому также испытывающий собственное изгибно-ударное взаимодействие со средой и являющийся главным исполнительным элементом тела рыбы, создающим основную часть силы тяги для всего тела.
4) Как у туловища, так и у хвоста есть особая точка, относительно которой совершаются изгибные движения туловища и хвоста и в которой сосредотачивается воздействие среды. Эта точка находится в районе 0.2 долей длины туловища рыбы со стороны её головы.
5) Изгибание движущегося туловища рыбы служит существенному снижению сопротивления, поскольку сопровождается процессами "отсоса" и "вливания" жидкости в пограничных слоях выгнутой и вогнутой сторон туловища.
6) Стабилизация направления движения рыбы, приводимой в движение движителем-хвостом, расположенным сзади, обеспечивается при изгибных движениях туловища рыбы возникновением условий стабилизации, аналогичных условиям стабилизации перевернутого маятника Капицы.
7) Изгибные движения туловища создают условия, аналогичные условиям движения массивного тела в вибрирующей жидкости, как в опытах Челомея, порождая поступательное движение туловища вперед за счет возникновения при этом обратных потоков, обтекающих тело.
Технические условия разработки определяются исходными положениями.
1. Рыба, как система двух последовательно соединенных движителей (фиг.1).
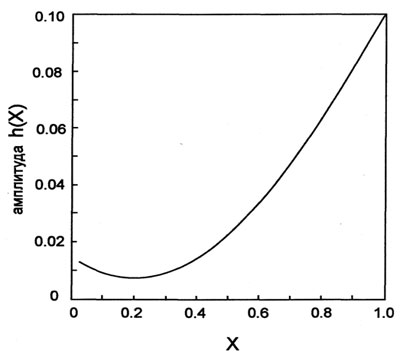
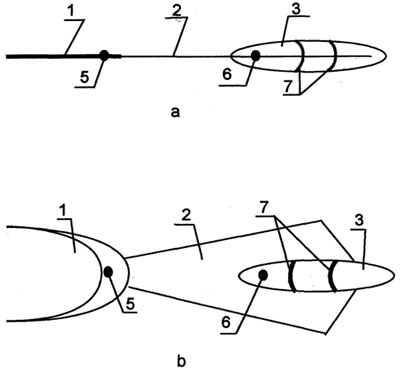
Туловище 1 и хвост 2 на рисунке фиг.1 рыбы обладают высокой степенью гибкости в плоскости, в которой осуществляется движение хвоста 2, при этом спинные плавники и плоскость хвоста расположены перпендикулярно плоскости движения хвоста. Центр тяжести туловища рыбы смещен от геометрического центра к голове. Туловище рыбы обладает высокой обтекаемостью. Согласно экспериментальным данным (Е.В. Романенко. Гидродинамика рыб и дельфинов. Изд-во КМК. М. 2001. С. -411.) в процессе плавания рыба совершает колебательные движения такие, что туловище 3 и хвост 4 (фиг. 1) колеблются в противофазе с различными амплитудами смещения относительно направления движения. На фиг. 2 приведена типичная зависимость смещения h(X) различных точек X тела рыбы, в процессе плавания. Обращает на себя внимание тот факт, что зависимость имеет минимум, расположенный в области X ≈ 0.2.
Нами (патент № 2259302 RU) выявлено, что эта точка для плоского гибкого обтекаемого тела обладает тем свойством, что захват тела в данной точке и прикладывание к ней ударного типа воздействия в поперечном к поверхности тела направлении приводит к возникновению максимальной силы тяги (при заданной силе воздействия в точке захвата тела), вынуждающей тело двигаться вперед в направлении поперек приложенной силы. При этом тело приобретает изогнутую форму, естественно соответствующую при заданных изгибных упругих свойствах заданного тела минимальному сопротивлению среды, аналогичную той, что сплошной линией показана на фиг.1.
Фиг.1
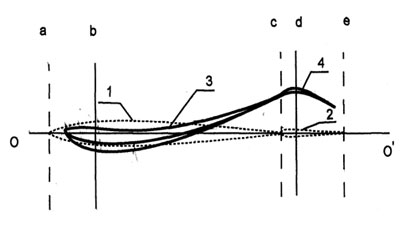
Точка, о которой шла речь выше, определяется правилом U=δ/l=0.29, где δ – смещение от геометрического центра (движителя – тела рыбы), вперед по продольной центральной прямой к носику, l – длина этой продольной прямой; такое значение параметра U соответствует значению X=0.21 для кривой на фиг.2. На фиг.1 линии а и е ограничивают по длине тело рыбы в состоянии покоя; линия с соответствует условной точке подвеса туловища рыбы как маятника или точке соединения туловища и хвоста рыбы; пересечение линий b и d с прямой ОО' указывают положения точек, соответствующие правилу U=0.29 для туловища (b) и хвоста (d) как отдельных движителей.
Фиг.2
Логичным продолжением наших исследований стало применение не одностороннего, а знакопеременного периодического ударного воздействия на гибкое упругое тело, чтобы это тело приобрело прямолинейное результирующее движение вперед, подобное движению вперед крыловой поверхности при ее маховых движениях. Эти исследования были выполнены. В результате выявлены возможности гибкого упругого тела быть движителем, отличающимся от традиционных гребковых движителей типа винта тем, что он не опирается, как винт, о воду, пытаясь ее оттолкнуть, а создает встречный продольный поток среды, поперечный к направлению ударного воздействия на тело.
В активном состоянии, очевидно, хвост рыбы является основным движителем. Достаточно обратится к тому факту (Е.В. Романенко. Гидродинамика рыб и дельфинов. Изд-во КМК. М. 2001. С. -411.), что дельфин с помощью хвоста удерживает вертикальное положение туловища над водой. Изгибное движение туловища рыбы приводит к поперечному ударному взаимодействию туловища и, как следствие, хвоста со средой. Согласно нашим результатам такое знакопеременное взаимодействие приводит к возникновению результирующей силы тяги, принуждающей тело рыбы, составленное из двух последовательно соединенных гибких упругих тел, к поступательному движению вперед.
Таким образом, два тела, обладающих гибкостью и упругостью, способные при поперечном взаимодействии ударного типа со средой приходить в состояние поступательного движения вперед, при последовательном соединении образуют систему. В этой системе у рыбы первый элемент системы "туловище", являясь движителем-контейнером, содержит все необходимые органы жизнеобеспечения, а второй – "хвост" – является основным движителем существа. Потеря хвоста приносит ему ограничения в скорости и маневренности движения, но не лишает жизнеспособности. Туловище рыбы существенно по массе превосходит хвост. Изгибные движения туловища позволяют рыбе легко изменять направление движения за счет изменения при этом момента инерции туловища при заданном моменте инерции хвоста.
2. Факторы, снижающие сопротивление движения рыбы. Обращает на себя внимание (фиг.1 и фиг.2) то, что при прямолинейном движении нос рыбы испытывает в примерно 8 раз меньшее смещение, чем хвостовая часть. Такое поперечное периодическое знакопеременное смещение тела рыбы в процессе ее перемещения в водой среде, называемое «рысканием», исследователи (Е.В. Романенко. Гидродинамика рыб и дельфинов. Изд-во КМК. М. 2001. С. -411.) относят к издержкам их движения.
На наш взгляд такое движение рыб не издержка, а необходимость для осуществления движения с меньшими энергетическими потерями.
Поясним это.
Тело рыбы состоит из двух основных элементов – туловища и хвоста. На фиг.1 схематически показаны два состояния рыбы – пассивное (пунктирная линия) и состояние активного (сплошная линия) взаимодействия со средой. В пассивном состоянии туловище и хвост вытянуты вдоль прямой ОО'. В активном состоянии туловище рыбы находится в изогнутом состоянии, вызванном сокращением боковых мышц туловища с одной стороны и расслаблением боковых мышц с другой стороны туловища. Естественно, что при этом сторона с сокращенными мышцами образует поверхность меньшей площади, чем та же площадь поверхности в пассивном состоянии. Для другой боковой стороны характерно увеличение площади поверхности по сравнению с той же площадью поверхности в пассивном состоянии. Это приводит к тому, что в первом случае жидкость, контактирующая с телом, вытесняется, т.е. происходит вливание жидкости в область пограничного слоя, что приводит с этой стороны тела к стабилизации условий его обтекания с малым сопротивлением, выражающейся в смещении критической точки и разделительной линия тока набегающего потока назад по направлению к выходной части профиля (или даже располагается в потоке за выходной кромкой). Во втором случае увеличение площади поверхности эквивалентно отсосу жидкости в области пограничного слоя, что ламинаризует потоки, с этой стороны обтекающие тело. Перекладывание рыбой усилия приводит к мгновенной смене режимов взаимодействия сторон со средой, не оставляя обтекающим потокам возможности для развития турбулентности в пограничном слое, что согласно (Г. Шлихтинг. Теория пограничного слоя. Изд. -во «Наука». М., 1974, с. - 712) служит существенному снижению сопротивления. Поэтому визуально наблюдаемое «рыскание» соответствует не энергетическим издержкам в движении рыбы, а процессу снижения сопротивления тела рыбы, т.е. снижению энергетических затрат на преодоление сопротивления среды.
3. Возникновение дополнительной силы тяги у "туловища".
В потенциальном гравитационном поле Земли обычный физический маятник в виде груза, закрепленного на конце стержня, другим концом закрепленного в точке подвеса, занимает положение, при котором груз находится ниже точки подвеса. В свободном состоянии покоя груз занимает положение, характеризующееся минимальной потенциальной энергией. Это состояние устойчивого равновесия маятника. Однако перевёрнутый маятник, у которого груз находится выше точки подвеса, также обладает состоянием устойчивого равновесия, если точку подвеса маятника привести в состояния принудительного, например, гармонического вертикального с большой частотой и малой амплитудой колебания под действием внешней силы. В таком случае отклонение маятника от вертикали приводит его в свободное колебательное движение относительно вертикали с уменьшением со временем амплитуды колебаний и переходом маятника в состояние покоя относительно вертикали.
На наш взгляд и в согласии с нашими результатами рыбы используют эффект обратного маятника, но в универсальном варианте. Т.е. в варианте, когда ось, вдоль которой производятся колебания и вдоль которой направлена сила тяги, произвольным образом ориентируется в пространстве.
Поясним это.
Наша разработка основана на экспериментальных фактах.
Замечено, что у маятника Капицы и маятника Челомея имеется общая закономерность: тело движется против направления действия результирующей силы, вызванной действием потенциальных полей.
В случае перевёрнутого маятника Капицы преобладает гравитационное поле Земли: при этом сила гравитационного взаимодействия, приложенная к массивному грузу маятника, направлена к Земле, а состояние равновесие таково, словно, по аналогии с обычным маятником эта сила направлена от Земли. Отклоненный от положения равновесия маятник в ходе затухающих колебаний движется вверх, чтобы занять свое положение устойчивого равновесия. Похожий вариант реализуется у Челомея для тяжелого груза, помещенного в сосуд с вибрирующей жидкостью. Но здесь эффективному потенциальному полю соответствует результирующая двух сил (силы тяжести и силы Архимеда), которая также направлена к Земле, а груз также движется вверх. Для лёгкого груза, плотность которого меньше плотности жидкости, результирующая тех же двух сил направлена от Земли, но груз тонет, словно результирующая сила направлена к Земле.
Движение груза в вибрирующей жидкости в соответствии с законом сохранения импульса должно сопровождаться возникновением потоков жидкости, обратных направлению движения груза.
Наш вывод. Таким образом, если потенциальное поле, воздействующее на тело, представляет собой композицию потенциальных полей, а результирующая сила их воздействия на тело направлена произвольным образом в пространстве, то, придавая некому протяженному маятникоподобному телу, типа тела рыбы, колебательные в «точке подвеса» (в точке соединения туловища и хвоста) с высокой частотой движения параллельно направлению действия результирующей силы, можем ожидать стабилизации положения тела вдоль направления действия этой результирующей силы. А если учесть то, что рыбы своими движениями создают встречный поток жидкости, то таким произвольным направлением будет направление силы тяги, создаваемой рыбой.
Для рыб характерно, что средняя плотность тела близка к плотности воды. Т.е. действия гравитационной и Архимедовой сил на плавающую рыбу взаимно компенсируются. Следовательно, эти поля исключаются из рассмотрения. Остается потенциальное поле сил сопротивления движению тела в жидкости. Такое поле возникает под действиями хвоста и туловища рыбы на окружающую среду, приводящими ее в движение от головы к хвосту и, следовательно, к возникновению сил сопротивления среды.
Пусть задан (Л.Д. Ландау, Е.М. Лифшиц. Механика. Гос. Изд. Физ. -мат. Лит. М., 1958, с - 258) перевёрнутый плоский маятник, точка подвеса которого совершает со временем t вертикальные вдоль оси у колебания по закону у=acosϒ×t с амплитудой а и угловой частотой ϒ. Положительное направление оси у - вертикальное. Если g - ускорение силы тяжести, a l – длина маятника, то положение маятника вертикально вверх при условии а²ϒ ²>2gl оказывается устойчивым для колебаний с большой частотой ϒ>>(g/l)0,5 и малых амплитудах а.
Следовательно, в произвольном потенциальном поле, действующем на тело с силой, определяемой ускорением g'≠g, условием устойчивости этого тела будет неравенство а²ϒ ²>2g'l. При этом а будет амплитудой продольных колебаний тела с частотой ϒ, a l будет определять положение его центра тяжести.
Пользуясь экспериментальными данными (Е.В. Романенко. Гидродинамика рыб и дельфинов. Изд.-во КМК. М. 2001. С. -411.), относящимися, например, к дельфину, длиной 2.2 метра, получаем оценки для частоты колебания хвоста 2.2 кол./с или частоты продольных колебаний туловища ϒ=2×2.2=4.4 кол./с=2π×4.4 рад./с=27.63 с-1. Здесь учтено, что одно полное колебание хвоста соответствует двум продольным возвратно-поступательным колебания туловища. Амплитуда этих колебаний а=0.15, а ускорение движения дельфина g'=3 м/с² при расположении центра тяжести от точки «крепления» хвоста l=1.5 м. Тогда согласно условию устойчивости перевернутого маятника левая часть равна (0.15) ²× (27.63) ² = 17.18, а правая – 2×3×1.5 = 9.0, что вполне удовлетворяет тому, что туловище у тела типа «рыба» будет вести себя как перевернутый маятник. Выполняется и условие для частоты - 27.63 >> (3/1.5)0.5= 1.4.
Из полученных оценок и из того, что известно о перевернутом маятнике, следует, что кроме выстраивания изгибающегося в процессе колебаний туловища рыбы вдоль направления ее плавания, как у маятника Капицы, происходит процесс движения туловища рыбы вперед, сопровождающийся «отдачей» в виде дополнительных от головы к хвосту потоков, обратных движению вперед тела рыбы, как у маятника Челомея.
Это еще одна из причин снижения сопротивления движению тела рыбы в среде по сравнению с её "мертвой" моделью, описанной в (Е.В. Романенко. Гидродинамика рыб и дельфинов. Изд.-во КМК. М. 2001. С. -411.).
Изобретение поясняется иллюстрациями, на которых:
На фиг.1 схематично показан профиль рыбы (вид сверху) в пассивном (пунктир) и активном (сплошная линия) состоянии. В пассивном состоянии 1 и 2 туловище и хвост соответственно расположены вдоль направления ОО' движения тела рыбы; в активном состоянии, тело рыбы изображено в момент завершения удара туловищем 3 и хвостом 4. Линии а и е соответствуют границам тела рыбы в состоянии покоя; линия с соответствует условной точке подвеса туловища рыбы как маятника или точке соединения туловища и хвоста рыбы; линии b и d соответствуют положению точек на туловище и хвосте, соответствующие правилу U=0.29 отдельно для туловища (b) и хвоста (d) как отдельных движителей.
Фиг.1
На фиг.2 показан график зависимости смещения Н точек X тела рыбы в процессе её активного движения (Е.В. Романенко. Гидродинамика рыб и дельфинов. Изд.-во КМК. М. 2001. С. -411.). Единицы измерения величин Н и X выражены в долях полной длины тела рыбы.
Фиг.2
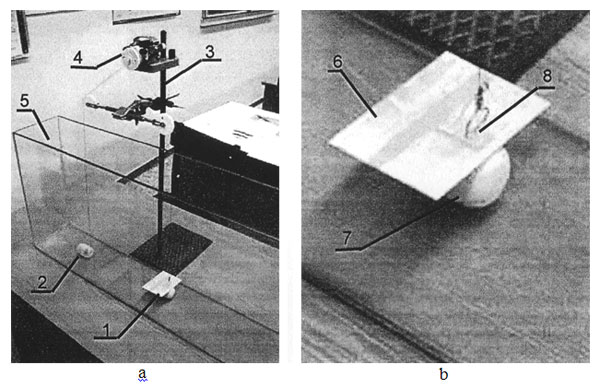
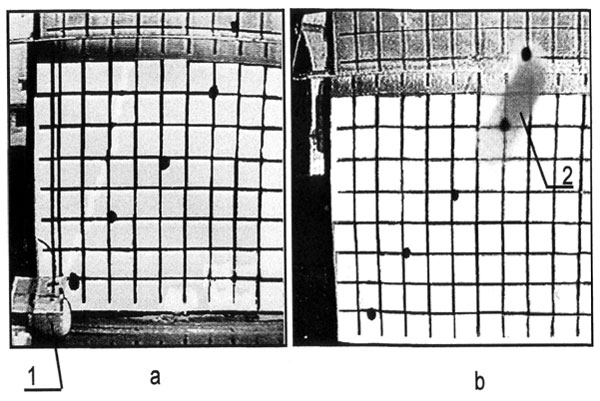
На фиг.3 фотография установки для проведения исследований и демонстрации поведения гибкого крылоподобного тела под действием ударного воздействия в поперечном к его результирующему движению направлении (фиг.3, а). Установка состоит из крыло-контейнера 1, груза сравнения 2, штатива 3, электрического двигателя 4, аквариума 5. Крыло-контейнер (фиг.3, b) с несущей гибкой плоскостью 6, собственно контейнером 7 (с грузом или без груза) захватывается нитью в точке захвата 8, определяемой правилом U=0.29 (патент № 2259302 RU).
Фиг.3
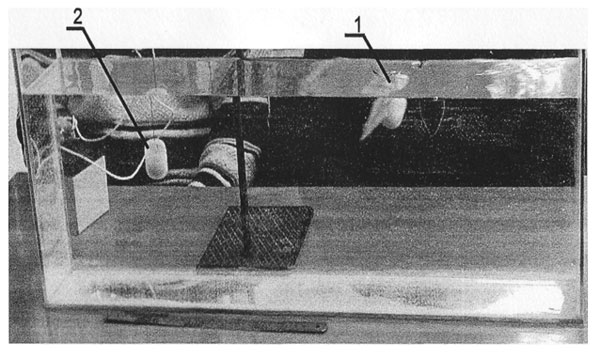
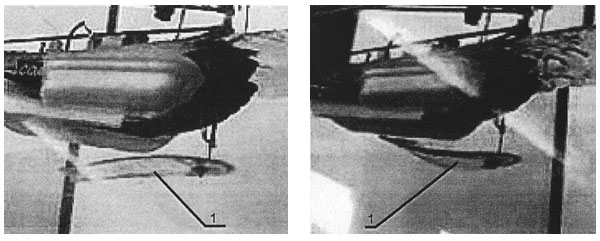
На фиг.4 фотография момента достижения крыло-контейнером 1 поверхности воды, когда груз сравнения 2 еще находится далеко от поверхности воды.
Фиг.4
На фиг.5 фотография момента достижения крыло-контейнером поверхности воды при увеличении поперечной силы воздействия, приводящем к увеличению его скорости движения вперед настолько, что фиксируется только размытый след.
Фиг.5
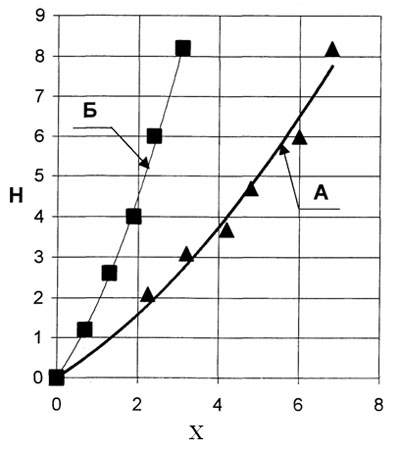
На фиг.6 приведены экспериментальные данные сравнения траекторий движения крыло-контейнера для разных точек его захвата нитью: Δ - захват в точке, соответствующей правилу U=0.29, ◊ – захват в центре носика. X – горизонтальное, а Н – вертикальное смещение крыло-контейнера в процессе движения в единицах 2.5 см. Кривая А - тренд для случая захвата в соответствии с нашим правилом U=0.29 описывается уравнением Н=0,0734Х²+0,6422Х с коэффициентом корреляции R2=0,9837. Кривая Б – тренд для случая захвата в центре носика описывается уравнением Н=0,3854Х²+1,4749Х с коэффициентом корреляции R2=0,9978.
Фиг.6
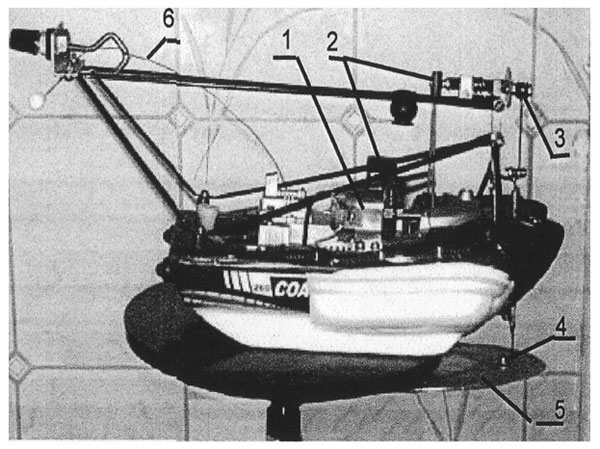
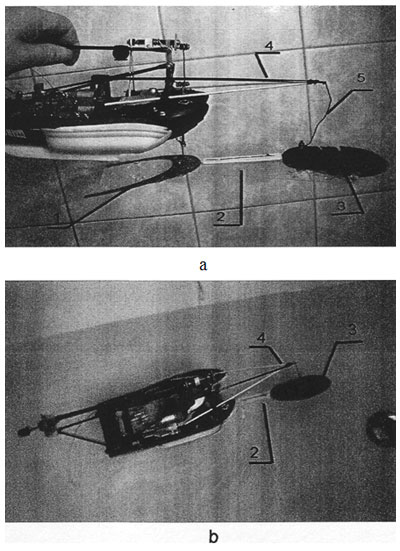
На фиг.7 приведена фотография радиоуправляемого устройства в виде плавающей модели судна, несущего электрический двигатель 1, четыре источника питания АА, напряжением 1.5В каждый, и электронную схему включения-выключения питания двигателя, скрытые внутри корпуса модели, шестеренчато-ременной редуктор 2, кривошипно-шатунный механизм 3, захват испытываемого тела штоком 4, испытываемое тело 5, антенну 6. модель расположена на демонстрационном столике.
Фиг.7
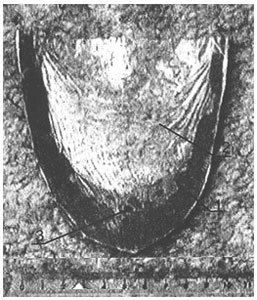
На фиг.8 фотография движителя-хвоста. Движитель - плоское гибкое упругое хорошо обтекаемое (с малым лобовым сопротивлением) в плоскости движителя тело с усеченной эллипсоидальной формой и переменной жесткостью. Жесткая серпоидальная фронтальная часть 1 тела движителя обтянута гибкой упругой пленкой 2, превращающей серпоидальное тело в половину эллипсоидальной поверхности. 3 - точка захвата движителя для передачи ему в вертикальном к плоскости движителя направлении ударного воздействия.
Фиг.8
На фиг.9 кадры видеосъемки движения модели, демонстрирующие два состояния движителя 1: а – фаза движения штока вверх, b – фаза движения штока вниз.
Фиг.9
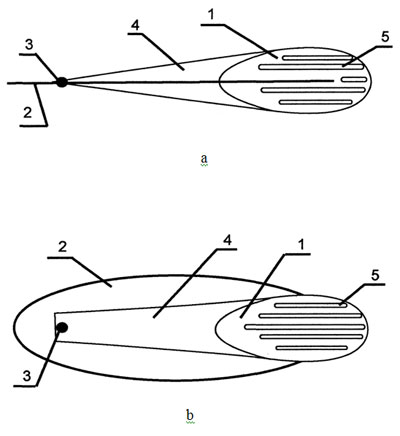
На фиг.10 схематично показаны две проекции (а – вид сбоку, b – вид сверху) тела «рыбы», составленного из двух последовательно соединенных частей: 1 – хвост, 2 и 3 – туловище, причем туловище представлено гибкой частью 2 и массивной частью 3. 5 – точка воздействия на хвост, а 6 – точка воздействия на туловище. 7 – разрезы позволяющие отдельным элементам массивной части туловища осуществлять изгибные деформации.
Фиг.10
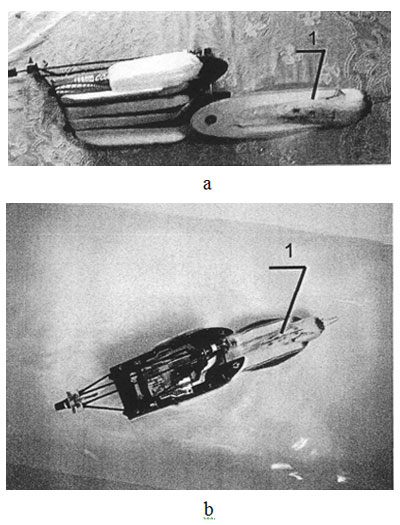
На фиг.11 фотографии общего вида а – устройства для испытания модели рыбы и вид b – устройство спущено на воду. 1 – хвост, 2 и 3 –туловище, 4 – рейка для передачи в процессе движения колебательной энергии судна с помощью жесткого поводка 5 туловищу рыбы.
Фиг.11
На фиг.12 схематично показаны две проекции (а – вид сбоку, b – вид сверху) движителя состоящего из двух частей туловища с двумя элементами 1 и 4, а также плавника 2. Часть туловища 1 изготавливалось из пенопласта с силиконовым продолжением 4 до хвостовой части. Пенопласт использовался с той целью, чтобы можно было металлическими внедряемыми в него грузиками 5 добиться равновесия туловища в погруженном в жидкость состоянии, т.е. чтобы Архимедова сила уравновешивалась силой тяжести.
Фиг.12
На фиг.13 фотографии устройства для испытаний в сборе (а) и в движении (b). На этих фотографиях 1 – испытуемое движитель-туловище.
Фиг.13
Для демонстрации реализации предлагаемого технического решения воспользуемся методом физического моделирования.
А. Выбор условий эффективного воздействия на плоское обтекаемое гибкое упругое тело.
Для проведения исследований и демонстрации поведения гибкого крылоподобного тела под действием ударного воздействия в поперечном к его результирующему движению направлении (патент № 2259302 RU) собрана установка (фиг.3, а). Установка состоит из крыло-контейнера 1, груза сравнения 2, штатива 3, электрического двигателя 4, аквариума 5. Крыло-контейнер (фиг.3, b) с несущей гибкой плоскостью 6, собственно контейнером 7 (с грузом или без груза) захватывается нитью в точке захвата 8, определяемой правилом U=0.29 (патент № 2259302 RU). В заполненном водой аквариуме при включении электродвигателя барабаном, расположенным на валу двигателя, с одинаковой скоростью наматываются нити, удерживающие крыло-контейнер и груз сравнения. При этом груз сравнения поднимается вертикально вверх, а крыло-контейнер по криволинейной траектории. В этих условиях на фотографии (фиг.4) зафиксирован момент достижения крыло-контейнером 1 поверхности воды, когда груз сравнения 2 еще находится далеко от поверхности воды. Увеличение поперечной силы воздействия на крыло-контейнер приводит к увеличению его скорости движения вперед настолько, что на фотографии (фиг.5) остается только размытый след. На фиг.6 приведены экспериментальные данные сравнения траекторий движения крыло-контейнера для разных точек его захвата нитью. X – горизонтальное, а Н – вертикальное смещение крыло-контейнера в процессе движения. Кривая А – тренд для случая захвата в соответствии с нашим правилом U=0.29 описывается уравнением Н=0,0734Х²+0,6422Х с коэффициентом корреляции R2=0,9837. Кривая Б - тренд для случая захвата за носик, описывается уравнением Н=0,3854Х²+1,4749Х с коэффициентом корреляции R2=0,9978. В случае захвата за центр траекторией движения будет просто вертикальная прямая. Различие в траекториях заключается в том, что при одинаковой скорости выбора нити быстрее всего крыло-контейнер покидает воду, двигаясь по траектории А.
Из этих данных следует, что знакопеременное поперечное воздействие на гибкое обтекаемое тело в соответствии с правилом U=0.29 должно приводить, во-первых, к его результирующему движению вдоль прямой линии, во-вторых, сила тяги должна быть максимальной для заданного тела.
Б. Гибкое упругое обтекаемое тело как движитель
В качестве устройства, задающего возвратно-поступательное движения испытываемым поверхностям, используется радиоуправляемая плавающая модель судна (фиг.7), несущего электрический двигатель, четыре источника питания типа АА напряжением 1.5 В каждый, электронную схему включения-выключения питания двигателя, понижающий шестеренчато-ременной редуктор 50/5 обор./с и кривошипно-шатунный механизм со штоком, имеющим точку захвата испытываемого движителя, расположенную вглубь жидкой среды. На фиг.8 приведена фотография движителя. На фиг.9 кадры видеосъемки движения модели, демонстрирующие два состояния движителя 1: а – фаза движения штока вверх, b – фаза движения штока вниз. Такие движения штока приводят к соответствующим изгибным движениям движителя и, как следствие, к возникновению потока жидкости, обратного направлению движения модели (модель движется слева направо). Коэффициент полезного действия (КПД) такого движителя превосходит КПД гребковых движителей, например, винта.
Поясним это.
Приведем результаты экспериментальных измерений.
Fср — сила, действующая на шток: определяется динамометром в процессе работы. Угловая скорость ω определялась числом n возвратно-поступательных движений штока за одну секунду, умноженным на 2π радиан.
Сила тяги Fтяги, создаваемая движителем, определялась путем ее измерения с помощью динамометра, закрепленного, с одной стороны, корпусом в штативе, а, с другой стороны, захватом для измерений за корпус модели. Динамометр располагался параллельно свободной поверхности воды; высота расположения – 1 см над поверхностью. Удержание действующей модели на месте с помощью динамометра позволяло измерить силу тяги.
Скорость V, установившегося движения модели под действием силы тяги, определялась путем измерения интервала времени Δt прохождения моделью заранее заданного интервала пути ΔS.
Плечо r кривошипа, равное 0,008 метра, конструктивно определило полный путь S, проходимый штоком за один полный цикл его возвратно-поступательного движения, как S=4×r=0,032 М. В свою очередь, величина d=S×n, определяет путь, пройденный штоком или точкой захвата движителя штоком за одну секунду; поэтому средняя скорость U движения численно равна d.
РАССЧИТЫВАЕМЫЕ ВЕЛИЧИНЫ
Коэффициент полезного действия η определяется отношением
η=Апол /Азатр (1)
где Апол – полезная работа движителя, а Азатр – затраченная работа движителя.
Поскольку мощность – это работа в единицу времени, то Nnoл= Апол/Δt, а
Nзатр=Азатр/Δt (2),
где Δt – интервал времени (в нашем случае Δt=1С), в течение которого выполнялась работа.
Тогда коэффициент полезного действия может быть определен как
η=Nпол/Nзатр (3).
Определим полезную мощность из выражения
Nпол=Fтяги×V (4),
а затрачиваемую мощность как
Nзатр=Fср×d (5)
Для сравнения с гребным винтом введем еще такую характеристику, как относительная поступь λ определяемую выражением λ=V/U, (5)
где V – скорость поступательного движения движителя или, для дальнейшего сравнения, гребного винта, a U=d×Δt – скорость прохождения движителем пути d за интервал времени Δt (в нашем случае Δt=1 С) или U=r×ϖ - окружная скорость, упомянутого винта.
В табл.1 приведены результаты измерений и вычислений для предлагаемого движителя, а также для сравнения приведены данные для модели с гребным винтовым движителем (Сахновский Б.М. Модели судов новых типов. Судостроение,1987 г. http://www.shipmodeling.ru/books/NewTypeShips/newtypeships.pdf.).
Таблица 1.
|
π |
ϖ |
Fср |
d |
Fтяги |
v |
u |
Nпол |
Nзатр |
η |
λ |
|
|
Наш движитель |
5,5 |
34,54 |
0,15 |
0,176 |
0,1 |
0,20 |
0,176 |
0,02 |
0,0264 |
76 |
1,1 |
|
Винт, Диаметр 0,05м |
50 |
314 |
3,67 |
0,04×50=2 |
2,22 |
1,5 |
1,2 |
3,33 |
7,34 |
45 |
0,855 |
Дополнительная информация. О зависимости коэффициента полезного действия η от относительной поступи λ известно (Гидр о аэродинамика. Л. Прандтль. R@C Dynamics.Москва-Ижевск: НИЦ "Регулярная и хаотическая динамика", 2002, 572 стр.), что максимальное значение ηmах коэффициента полезного действия для винта летательного аппарата достигает значения 80% при относительной поступи λ ≈0,25. При меньших значениях λ, близких к нулю, летательный аппарат приближается к состоянию покоя, а винт находится в режиме холостого хода, т.е. η=0. При значениях λ, больших указанного значения, летательный аппарат движется с такой скоростью, что встречный поток начинает раскручивать винт, что схоже с режимом холостого хода винта. И в этом случае η=0. Т.е., например, полет летательного аппарата с поступью винта, близкой к единице, вообще исключен из возможных режимов движения.
Обращаясь к результатам, содержащимся в табл.1, видим, что в случае плавающей модели гребной винт дает более низкое значение коэффициента полезного действия η=45%, чем для использованных нами средств, для которых η=76%. Существенно и различие в значениях относительной поступи: для предлагаемых средств λ=1,1, что приблизительно на 30% выше значения λ=0,855 относительной поступи для гребного винта. Модель с гребным винтом движется в семь с половиной раз быстрее – 1,5 > 0,2 м/с, но при этом, и энергетические потери у модели с гребным винтом весьма существенные 7,34/0,0264 = 282!!! Т.е. "провал" в среду, сопровождающий гребковые движители, приводит к существенным экономическим потерям. Полученные результаты позволяют судить о существенном экономическом выигрыше предлагаемых безопорных вихревых средств возбуждения силы тяги перед всеми вариантами гребковых средств.
Таким образом, выбирая форму хвоста и вариант передачи ему энергии движения в соответствии с вышеизложенными результатами, получаем высокоэкономичный движитель для системы хвост-туловище рыбы.
Туловище тоже могло бы иметь уплощенную форму, но есть необходимость размещать в туловище органы жизнедеятельности рыбы. Поэтому эта часть тела рыбы должна кроме свойства высокой гидродинамической обтекаемости гибкости и упругости иметь некоторый внутренний объем для размещения органов жизнедеятельности, а потому большую массу. Это и наблюдается в природе.
В. Система из двух последовательно соединенных элементов движитель-хвост и движитель-туловище.
Для этого используется физическая модель.
На фиг.10 схематично показаны две проекции (а – вид сбоку, b – вид сверху) модели тела «рыбы», составленного из двух последовательно соединенных частей: 1 – хвост, 2 и 3 – туловище, причем туловище представлено гибкой частью 2 и массивной частью 3. 5 – точка воздействия на хвост, а 6 - точка воздействия на туловище. 7 – разрезы позволяющие отдельным элементам массивной части туловища осуществлять изгибные деформации. На фиг.11 фотографии общего вида а – устройства для испытания модели рыбы и b - вид этого устройства, спущенного на воду. 1 – хвост, 2 и 3 – туловище, 4 – рейка для передачи в процессе движения колебательной энергии судна туловищу рыбы с помощью жесткого поводка 5, шарнирно соединенного с рейкой 4 и туловищем 3. Такое соединение туловища рыбы с корпусом судна позволяет осуществлять движение туловища в противофазе хвосту и тем самым моделировать движение тела натуральной рыбы. Причем моделирование осуществляется в виде двух последовательно соединенных гибких упругих гидродинамически обтекаемых элементов – туловища и хвоста, испытывающих одновременное в противофазе знакопеременное ударное воздействие, что имитирует движение натуральной рыбы, вызываемое сокращением боковых мышц ее туловища.
Г. Результаты испытаний модели рыбы.
Испытание модели рыбы заключалось в проведении измерений скорости движения в вариантах: первый – модель рыбы, содержащая хвост и туловище, является движителем, второй – туловище рыбы находится в пассивном состоянии и буксируется. При этом ожидается, что туловище в активном состоянии будет способствовать движению, а в пассивном затруднять это движение.
В таб.2 приведены данные о скорости движения плавающего устройства в трех вариантах: 1 – вариант, когда устройство содержит радиоуправляемую плавающую модель судна, снабженного моделью хвоста рыбы в качестве движителя, 2 – вариант, когда к варианту 1 добавлен элемент туловище-движитель или судно в качестве движителя имеет все тело рыбы в качестве движителя, 3 – вариант, когда элемент туловище рыбы не является активным элементом устройства, а является буксируемым пассивным телом, плоскость которого расположена вдоль направления движения всего устройства.
Таблица 2.
|
№ |
Варианты испытаний |
Масса, кг |
Скорость движения устройства, м/с |
|
1 |
Судно + движитель-хвост |
0,5 |
0,2 |
|
2 |
Судно + модель рыбы |
0,58 |
0,14 |
|
2 |
Судно + движитель-хвост, буксирующее туловище |
0,58 |
0,09 |
Из данных табл.2 (стр.2 и 3) следует, что, как и ожидалось, вариант активного туловища по скорости движения существенно превосходит вариант пассивного туловища, 0.14 > 0.09 м/с.
Поскольку в избранном варианте устройства значительная энергия затрачивалась на перемещение судна, то в варианте размещения источников питания, двигателя, привода и схемы радиоэлектронного управления в туловище модели рыбы, будут получены результаты, соответствующие строке 1 и лучше.
Д. О влиянии продольных колебаний туловища.
Продольные колебания туловища моделировались следующим образом. На фиг.12 показаны проекции движителя-туловища: а – вид сбоку, b – вид сверху. Движитель-туловище состоял из двух частей собственно туловище с двумя элементами 1 и 4, а также плавник 2. Часть туловища 1 изготавливалось из пенопласта с гибким упругим силиконовым продолжением 4 до хвостовой части. Пенопласт использовался с той целью, чтобы можно было металлическими внедряемыми в него грузиками 5 добиться равновесия туловища в погруженном в жидкость состоянии, т.е. чтобы Архимедова сила уравновешивалась силой тяжести. Силиконовое обтекаемое продолжение от головной к хвостовой части выбиралось для того, чтобы добавить жесткости в гибкий плавник, не позволяющей плавнику в его средней части образовывать волну сжатия из-за сминания плавника в процессе возвратно-поступательного движения туловища. На фотографиях (фиг.13) можно видеть устройство в сборе (а) и в движении (b). На этих фотографиях 1 – движитель-туловище.
Необходимо отметить, что движитель-туловище лишь в одной точке захвата 3 (фиг.12) имел связь с судном.
Запуск двигателя привел к тому, что хвостовая часть плавника движителя в точке захвата стала совершать колебательные движения под действием колеблющегося в поперечном направлении штока. Сам движитель-туловище стал совершать горизонтальные возвратно- поступательные колебательные движения. При этом судно стало двигаться вперед (это можно видеть на фотографии фиг.13, а) со скоростью 0.07 м/с.
В случае принудительного движения судна с такой же скоростью, но с выключенным двигателем, встречный поток воды приводит к тому, что движитель в его головной части сразу же отклоняется от своего первоначального уровня, приходя в состояние крайнего загиба.
Описанное поведение движителя как массивного тела, имеющего точку подвеса, колеблющуюся и заставляющуюся колебаться само тело в потенциальном поле обтекающего потока, соответствует условиям поведения перевернутого маятника. Действительно, амплитуда колебаний а=0.005 м, частота колебаний ϒ=2×3.5 кол./с =2×2π× 3.5 рад/с = 44 рад/с, длина l=0.13 м и ускорение g'=0.027 м/с² дают для величины (а²×ϒ ²)/2l= 0.188 м/с² >0.027 м/с². Т.е. условие стабильности перевернутого маятника а²ϒ²>2g'l выполняется. Выполняется и условие ϒ>> (g'/l)0,5, поскольку 44²>>(0,027/0,13) = 0,21.
При движении устройства под действием работающего движителя вывод слабым щелчком головной части движителя из положения равновесия приводит его к затухающим колебаниям с окончательным выстраиванием движителя по направлению движения устройства. Частота затухающих колебаний оказывалась в несколько раз (примерно 4) меньше частоты колебаний точки захвата. Более резкий толчок приводит движитель к необратимому отклонению движителя от направления движения судна. Такое поведение движителя объясняет стабильность движения быстрых рыб и дельфинов: быстрый встречный поток воды не может столкнуть их с выбранного курса. Но отклонившись на угол, достаточный для выхода из области стабильности, дельфин без особых энергетических затрат может быть выброшен встречными потоками из воды – это и есть известные прыжки дельфина из воды при их движении параллельно курсу движущегося судна.
Е. Таким образом, из всего вышеизложенного вытекает, что можно два движителя соединить последовательно в одно тело по типу рыбы, причем один движитель, основной, функционально аналогичен хвосту рыбы, а второй - аналогичен туловищу рыбы. При этом в туловище рыбы-робота по аналогии с натуральной рыбой сосредоточены все основные органы, необходимые для его «жизнедеятельности». Движение такого устройства осуществляется под действием силы тяги, порождаемой одновременным поперечным ударного типа воздействием на окружающую текучую среду хвостом и туловищем. Это воздействие реализуется путем периодических знакопеременных изгибных движений туловища, приводящих к изгибным деформациям хвоста, подобных крылоподобному профилю, но обратных деформациям туловища. Движения и деформации хвоста и туловища подобны маховым движениям двух крыльев, соединенных последовательно, причем маховое движение осуществляется в противоположные стороны. Такое поперечное движение хвоста и туловища порождают движение рыбы-робота вперед.
Разработанные устройство и способ его движения позволяет использовать их для решения задач исследования подводного пространства как в мирных, так и в военных целях. Разработка может использоваться для решения задач военной подводной разведки и для боевого применения.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Способ движения "рыба" в сплошных текучих средах, основанный на поведении двух движителей махового типа, выполненных в виде гибких упругих гидродинамически обтекаемых плоских или объемных тел, совершающих маховые движения и создающих собственные силы тяги, отличающийся тем, что движители соединены последовательно в одну систему, в которой они совершают колебательные движения в противофазе друг к другу, причем один из них, называемый хвостом, является основным движителем, а второй движитель, называемый туловищем, является источником изгибно-ударного воздействия хвоста и туловища на окружающую среду, при этом изгибно-ударное воздействие самого туловища на среду осуществляется таким образом, что возникают явления отсоса жидкости в пограничном слое с выпуклой стороны и вливания жидкости в пограничный слой с вогнутой стороны, что повышает критическое число Рейнольдса и снижает сопротивление движения, обусловленное турбулизацией пограничного слоя, а возникающие из-за изгибных деформаций туловища и хвоста продольные колебания тела воспроизводят условия стабилизации направления действия силы тяги, подобные условиям стабилизации обратного маятника Капицы, и способствуют возникновению дополнительной силы тяги тела, подобной силе, приводящей массивное тело в вибрирующей жидкости по Челомею в состояние вертикального движения вверх, но уже для произвольного в пространстве направления колебаний тела вдоль действия результирующей силы тяги.
Устройство типа "рыба" для создания силы тяги в текучих средах, состоящее из двух гибких упругих гидродинамически обтекаемых плоских или объемных тел, предназначенных как движители для создания продольной силы тяги при их поперечном маховом движении, отличающееся тем, что тела как хвост и туловище рыбы соединены последовательно в одну систему, причем маховые движения тел совершаются одновременно и в противофазе друг другу, при этом первое тело, называемое хвостом, представляет собой сплошное тело и как главный движитель предназначен для создания основной силы тяги устройства, второе тело, называемое туловищем, представляет собой объемное массивное тело, заполняемое средствами обеспечения автономной работоспособности устройства с центром масс, расположенным в области U=0.29, осуществляющее изгибно-ударные знакопеременные движения в среде, приводящие в маховое движение хвост, закрепленный в хвостовом окончании туловища так, что реализуется правило U=0.29 применительно к хвостовой поверхности.
РЕФЕРАТ
Предлагаются способ движения типа "рыба" в текучих средах и устройство для его осуществления. Для реализации способа используется последовательное соединение в систему двух гибких упругих гидродинамически обтекаемых тел типа "туловище" и "хвост" рыбы, способствующих при поперечных изгибно-ударных в противофазе махового типа движениях возникновению силы тяги, приводящей систему в продольное движение. При этом первое тело, называемое "туловищем", является источником энергии изгибно-ударных движений для системы вообще, а второе тело, называемое "хвостом", является главным исполнительным механизмом для создания основной силы тяги системы. Вместе с тем изгибно-ударные движения туловища также приводят к возникновению его собственной силы тяги, обусловленной свойствами самого туловища.
Снижению сопротивления окружающей среды способствуют процессы "отсоса" и "вливания", возникающие при изгибных движениях туловища "рыбы". Из-за продольных колебательных движений туловища возникают условия, подобные тем, при которых реализуются перевернутый маятник Капицы и маятники Челомея, что приводит к соответственно к стабилизации направления движения "рыбы" и к возникновению дополнительной силы тяги. Для реализации устройства используется последовательное соединение двух махового типа движителей, маховое в противофазе движение которых воспроизводится в согласии с правилом U = 0.29, определяющим точку поперечного воздействия на движитель с целью получения максимальной продольной силы тяги.
Способ и устройство могут использоваться как средства для глубоководного погружения или дальнего подводного перемещения как в мирных, так и в военных целях, для решения боевых задач, задач обследования затопленных тел, задач подводного перемещения и доставки грузов различного назначения, а также решения самых различных задач разведки.
Предложенные способ и устройство отличают от гребного винта, клина или формальных аналогий типа "рыба" или "рыбий хвост" высокий КПД и существенно лучшие технические показатели. 13 илл.
Размещено 18.08.2012