Основанием для разработки конструкции механизма явилась статья автора « О центробежном движителе », опубликованная 5 июня 2011 года в интернете, в которой предложена «Теория центробежного движителя». Описанные теория и предлагаемая конструкция могут служить основой для разработки простого антигравитационного движителя.
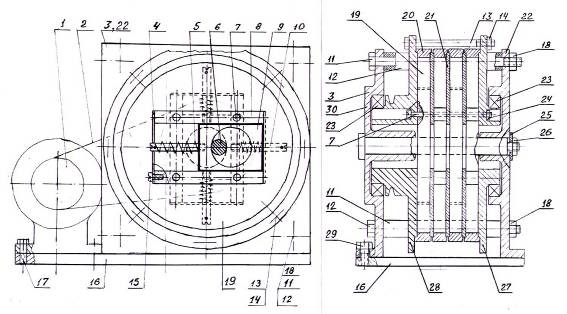
На основании (поз.16) винтами (поз.29) закреплены стойки поз.3 и поз.22, которые скреплены между собой через 4 распорные втулки поз12.болтами поз.11 и гайками поз.18.
В стойках поз.3 и поз.22 на двух подшипниках поз.23 вращается барабан поз.19, состоящий из дисков поз.28 и поз.27, которые скреплены между собой болтами поз.13 и гайками поз.14. Между дисками поз.28 и поз.27 находятся 4 кольца поз.20, между которыми вставлены 3 диска поз.21 с отверстиями, через которые проходит вал поз.6, удерживаемый от перемещения шайбой поз.25 и гайкой поз.26.
В пространстве между дисками поз.28 , поз.27 и поз.21, вставлены по 2 направляющих поз.8., между которыми перемещается ползун поз.9 с отверстием.
При вращении барабана поз.19 вместе с дисками и направляющими ползун поз.9 под действием пружины поз.5 постоянно прижимается к валу поз.6, обеспечивая одностороннее смещение ползуна с оси вращения барабана при его вращении. К направляющим поз.8 (по 2 штуки в каждом зазоре) с одной стороны винтами поз.15 крепится пластина поз.4 для упора пружины.
Пружина для устойчивости центрируется на шпильке поз.10, которая вворачивается в торец ползуна, а второй конец шпильки входит в отверстие упорной пластины поз.4.
Вращение барабана осуществляется двигателем поз.1 через ременную или цепную передачу поз.2 и шкив или зубья на диске поз.28.
Начальное положение ползуна (момент создания максимальной центробежной силы) рис .1
Рис.1
В каждом зазоре барабана поз.19 находятся по 2 направляющих поз.8, которые расположены симметрично относительно оси вращения барабана. Болтами поз.7 и гайкой поз.24 направляющие поз.8 связывают диски поз.28, 21 и 27. Каждая следующая пара направляющих повернута относительно друг друга со смещением по часовой стрелке на 90 градусов.
Между двумя направляющими поз.8 перемещается ползун поз.9, движение которого ограничено валом поз.6, к которому ползун прижимается пружиной поз.5.
При вращении барабана поз.19 с дисками и направляющими ползун поз 9, увлекаемый дисками и направляющими поз.8 обкатывается вокруг вала поз.6, но центр тяжести ползуна никогда не пересекает вертикальную ось У, так как отверстие ползуна всегда равно: D = 2(d + х) , где D – диаметр отверстия ползуна ,
d – диаметр вала поз.6 ,
х – расстояние от оси вращения дисков до вала поз.6.(Рис.2)
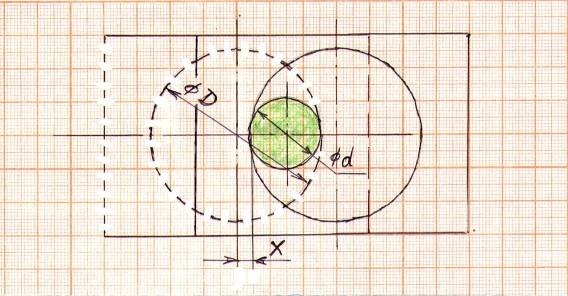
Рис.2
Поворачиваем барабан поз.19 на 45 градусов по часовой стрелке. Под действием центробежных сил и пружины поз.5 центр тяжести ползуна смещается с оси Х, расстояние от оси вращении до центра тяжести ползуна уменьшается.(Рис.3)
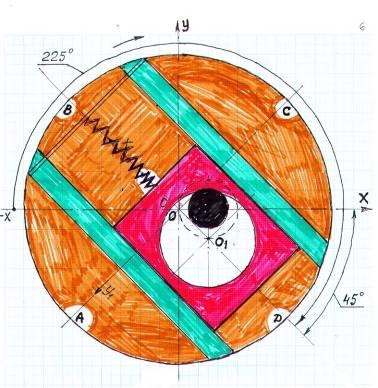
Рис.3
Рассмотрим действие сил, сопровождающих этот момент. Центробежная сила в точке контакта ползуна с валом разлагается на Fx и – Fy (рис.4)
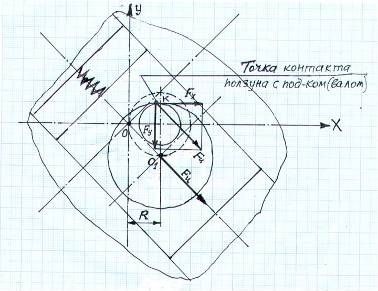
Рис.4
Поворачиваем барабан еще на 45 градусов по часовой стрелке. Ползун, обкатываясь вокруг вала поз.6, повернется так, что его центр тяжести совпадет с осью вращения барабана, при этом центробежные силы по осям Х и У пропадают (Рис.5).
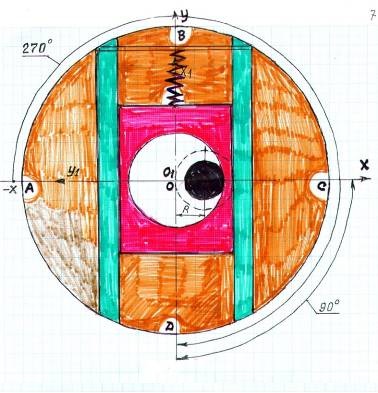
Рис.5
ВНИМАНИЕ !!!
Поворачиваем барабан еще на 45 градусов. Обкатываясь по валу, ползун поворачивается вокруг своей оси и оси вращения барабана, но никакого перемещения его центра тяжести не происходит, так как его движение ограничено контактом внутреннего диаметра ползуна и валом. Никаких центробежных сил нет! (Рис.6),- в этот момент происходит переход из динамической системы координат в неподвижную систему координат ( по А.Эйнштейну ).
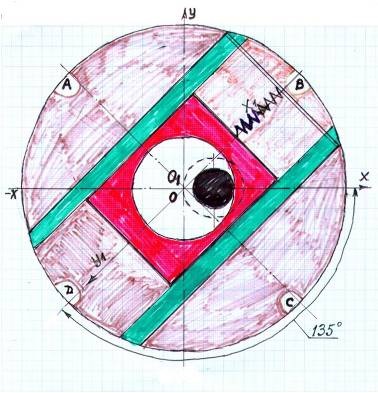
Рис.6
Поворачиваем барабан еще на 45 градусов .Центр тяжести ползуна остается на месте –никаких сил от поворота – вращения вокруг собственной оси и оси вращения барабана не возникает.(Рис.7)
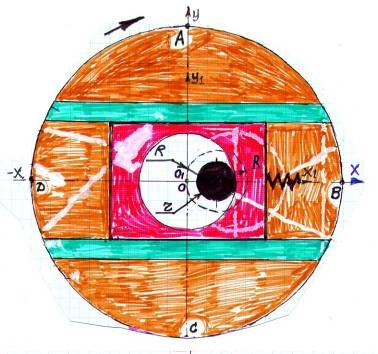
Рис.7
Поворачиваем барабан еще на 45 градусов. Центр тяжести ползуна все еще остается на месте, никаких сил от поворота – вращения вокруг собственной оси и оси вращения барабана не возникает. (Рис.8)
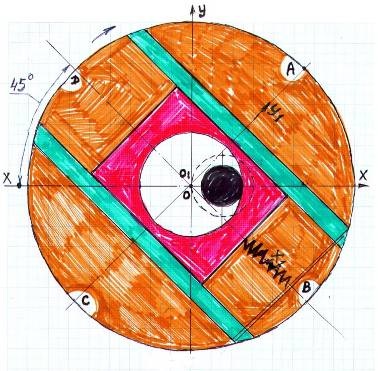
Рис.8
Поворачиваем барабан еще на 45 градусов. Никаких сил не возникает. (Рис.9)
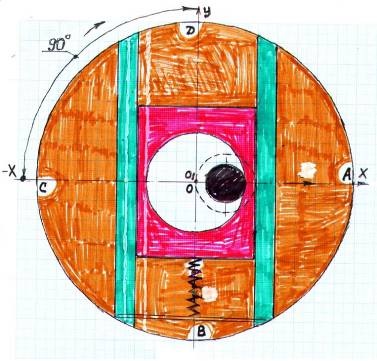
Рис.9
Поворачиваем барабан еще на 45 градусов. Под действием пружины центр тяжести ползуна смещается с оси вращения барабана в сторону оси Х.(Рис.10), происходит возврат в систему координат динамической системы!
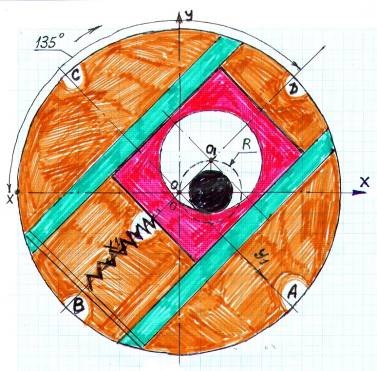
Рис.10
Рассмотрим какие силы возникают в этот момент. (Рис.11).
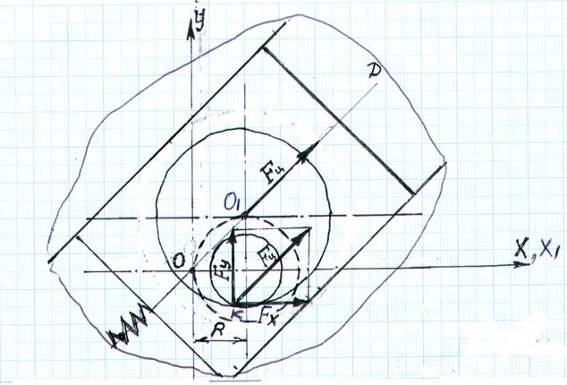
Рис.11
В точке контакта К центробежная сила от вращения ползуна разлагается на Fx и +Fy. При дальнейшем повороте до начального положения (Рис.2) центробежная сила достигает максимальной величины при совпадении с осью Х.
Силы , возникающие по оси У - взаимоуничтожаются.
Построим графики изменения сил, возникающих от вращения ползуна. Сам ползун приводится во вращение относительно оси дисков и оси вала за счет того, что направляющие, закрепленные на дисках, перемещают его за боковые поверхности, а пружина постоянно прижимает его к валу.
От одного ползуна возникают силы (Рис.12).
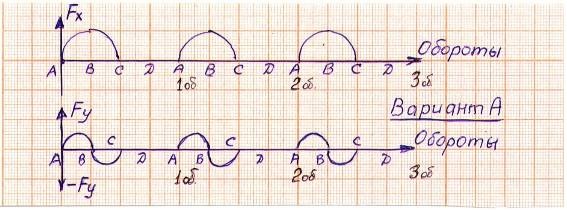
Рис.12
От второго ползуна возникают силы (Рис.13).
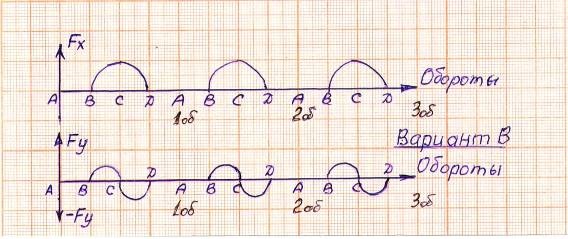
Рис.13
От третьего ползуна возникают силы (Рис.14).
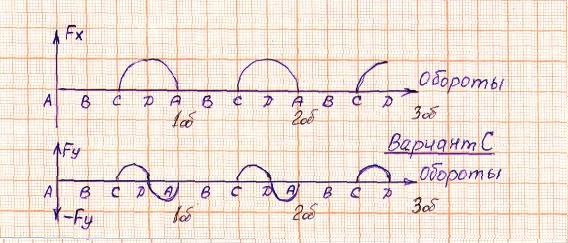
Рис.14
От четырех ползунов, расположенных друг за другом, со смещением на 90 градусов по часовой стрелке, силы будут такими (Рис.15).
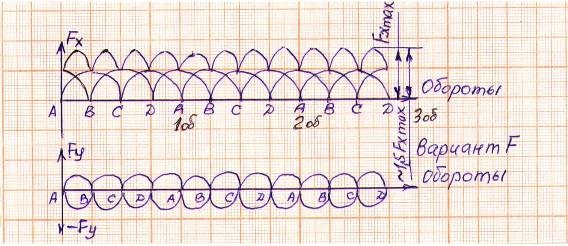
Рис.15
То есть, мы имеем постоянную одностороннюю силу по оси Х, но ее величина 4 раза изменяется от Fх макс. до приблизительно 1,5 Fх макс. в течение одного оборота дисков. Силы, возникающие по оси У- взаимо- уничтожаются.
Но, кроме центробежных сил в нашем случае возникают силы Кориолиса.
Сила Кориолиса определяется по формуле:
 , где
, где
Fкор – сила Кориолиса, действует всегда перпендикулярно к оси вращения и к направлению движения тела;
m – масса тела;
n – число оборотов;
V+ – скорость тела, перпендикулярная к оси вращения.
![]() , тогда
, тогда

Отсюда видно, что сила Кориолиса
во-первых, в 2 раза больше центробежной силы Fц=39,4mn2R;
во-вторых, действует в том же направлении, что и центробежная сила.
Таким образом, суммарная сила, действующая по оси ОХ будет состоять из суммы F ц и F кор

И в варианте F ( при установке 4-х ползунов под 90° друг относительно друга, но в точке B диска, при пересечении оси Х
все обеспечивают Fx max) , эта сила будет 4 раза колебаться от
Fx max до ?1,41 Fx max в течение одного оборота диска.
Инженер – механик, Рублев Анатолий Николаевич (РАНч)
Город Самара , 2012 год.
Универсальный движитель, способный перемещать предметы в любой среде (по Земле, в воздухе, в воде и Космосе) – такая мысль даже не приходила в голову инженерам от глубокой древности до наших дней. Для каждой среды отдельно были изобретены колесо, воздушный и гребной винт, и ракета. Каждое из этих изобретений исправно выполняли поставленную перед ним задачу – перемещать предметы в своей среде. Наука ХХ века добросовестно помогала довести эти изобретения до совершенства, создавая различные теории, помогающие решению поставленных задач, пока не достигла критических параметров, когда дальнейшее улучшение конструкции не стоит тех затрат, которые уходят на улучшение конструкции.
В 1945 году американская военная экспедиция к Антарктиде столкнулась с необъяснимым по тем временам явлением – из воды бесшумно вылетали непонятные объекты, которые с успехом разгромили американскую эскадру и она, собрав уцелевшие корабли, ушла домой. При этом ни один объект не был сбит, так как эти объекты летали вокруг эскадры бесшумно, на очень большой скорости и также бесшумно исчезли в воде.
Прошло более половины века. За это время инженеры начали пытаться создавать различные конструкции, чтобы хоть как-то приблизиться к решению задачи по созданию универсального движителя. Появились конструкции инерцоидов, католетов и центробежных движителей, но это были конструкции, в основном пригодные для какой-то одной среды и, как правило, не очень удачные, так как даже в своей среде они не делали революции.
Родоначальниками инерцоидов признаны Владимир Николаевич Толчин (Пермь-1936 год) и Н.А.Дин [патент США N 2886976 от 19.05.1959 года], а в качестве теоретиков, объясняющих принцип действия инерцоидов, надо отметить выдающихся физиков Евгения Андреевича Ларикова (Объединение "Ариэль"), Н.Ф.Лебедева, Александра Викторовича Каравайкина (до 1998 года - рук.лаборатории "Вега") и Геннадия Ивановича Шипова (МГУ)
Анализируя рассказы участников американской экспедиции, невольно возникает вопрос, а за счет чего и как перемещаются в пространстве эти объекты? Ну, допустим, энергии, как у подводных лодок, у них может быть в избытке, но никакого винта для перемещения в воде и воздухе американцы не заметили. Получается, что объекты перемещаются в воздухе и воде за счет внутренних сил. Но современная наука отрицает перемещение в пространстве за счет внутренних сил,- для этого сконструирована ракета. Но, признаков ракеты на объектах американцы тоже не заметили. Парадокс!
В своей книге” Тайна тяготения” д.т.н., профессор В.Меньшиков – директор НИИ КС, отметил: “Энергетические параметры существующих реактивных двигателей уже почти приблизились к своему пределу, возможности их совершенствования практически исчерпаны, и даже незначительное улучшение энергомассовых и экологических характеристик таких двигателей требует больших временных, технологических и финансовых затрат. Реактивные двигатели (как силовые, так и исполнительные) при длительной работе потребляют большое количество топлива, на один-два порядка превышающее вес самих двигателей, в частности, необходимость в обеспечении их большими запасами топлива, в будущем могут создать большие проблемы в освоении дальнего космоса”.
Применение центробежных движителей значительно сократит вес летательных аппаратов за счет того, что потребляемая энергия будет расходоваться только на вращение барабанов с дисками и ползунами с оборотами от1000 до 10000 - 30000 оборотов в минуту в зависимости от массы вращаемых деталей и нужной тяги.
При установке на движитель (УУВНТ) Устройства Управления Величиной и Направлением Тяги, аппарат c таким движителем может зависать в любой среде, моментально изменять величину и направление тяги, до отрицательной такой же величины ( для автоматических аппаратов, - человек больше 10g не выдержит!!! ), управляя простым штурвалом, как летчик.
В зависимости от назначения аппарата, движитель с УУВНТ может иметь несколько модификаций:
1. Для автомобиля нужен один движитель, обеспечивающий максимальные обороты и изменение тяги в пределах от Fx макс. до – Fx макс. в одном направлении. При расчете динамики автомобиля учитывать дополнительную боковую составляющую центробежной силы, возникающую при повороте автомобиля.
2. Для подводной лодки и летательных аппаратов нужно от двух до шести движителей, обеспечивающих изменение тяги во всех направлениях (вперед - назад, вверх - вниз, влево - вправо) с изменением тяги на каждом движителе в пределах от +F макс. до –F макс. во всех направлениях.
3. Попробуем рассмотреть, а за счет чего и откуда берутся силы для перемещения Изделия по оси О1X1 при вращении детали m вокруг оси О1Z1?
3.1.При вращении барабана с дисками 4 раза в течение одного оборота происходит одностороннее изменение радиуса вращения центра тяжести детали (деталей)m от нуля до R макс. и до нуля в первой половине оборота, а во второй половине оборота - R равен нулю.
3.2.Происходит 4 раза за один оборот одностороннее изменение веса-массы вращающегося диска за счет изменения радиуса вращения детали m.
3.3Происходит 4 раза за один оборот одностороннее изменение момента инерции дисков за счет одностороннего изменения радиуса вращающейся массы.
3.4.Происходит 4 раза за один оборот угловой поворот вращающейся массы (Возникает Кориолисово ускорение).
4.Еще cо времен школы (опыт Толмена и Стюарта) мы знаем что любое быстро вращающееся металлическое тело - это центрифуга для электронов. Они под действием центробежной силы отбрасываются к ободу диска.
С позиций электротехники и электродинамики все быстро вращающиеся металлические тела являются одновитковыми короткозамкнутыми контурами. Благодаря огромным токам, протекающим в них, создается магнитное поле, направление которого зависит от того, в какую сторону вращается диск.
5.Из статьи академика В.С.Околотина - «В поисках инерцоида».
…Итак, ИМГ, ИУГ, ИПР, ИПМ, ИХ, ИД..(типы инерцоидов- прим. автора). Кто знает, не появятся ли в редакционной почте новые И (инерцоиды) ? А потому поспешим вынести главное хотя бы из столь краткого, далеко не полного, но, заметьте, доброжелательного обзора. Оно же, думается, сводится к следующему: соль вопроса в поиске уничтожения одной из двух противонаправленных сил. Другое дело – как это сделать. Трением? Расширением? Еще чем-нибудь?
Инженер – Рублев Анатолий Николаевич
e-mail: anatrublev@yandex.ru
тел.: 8(905)3043032, (846)201-99-58
Размещено на сайте с разрешения автора 23.12.2013.
Статьи других авторов
На главную